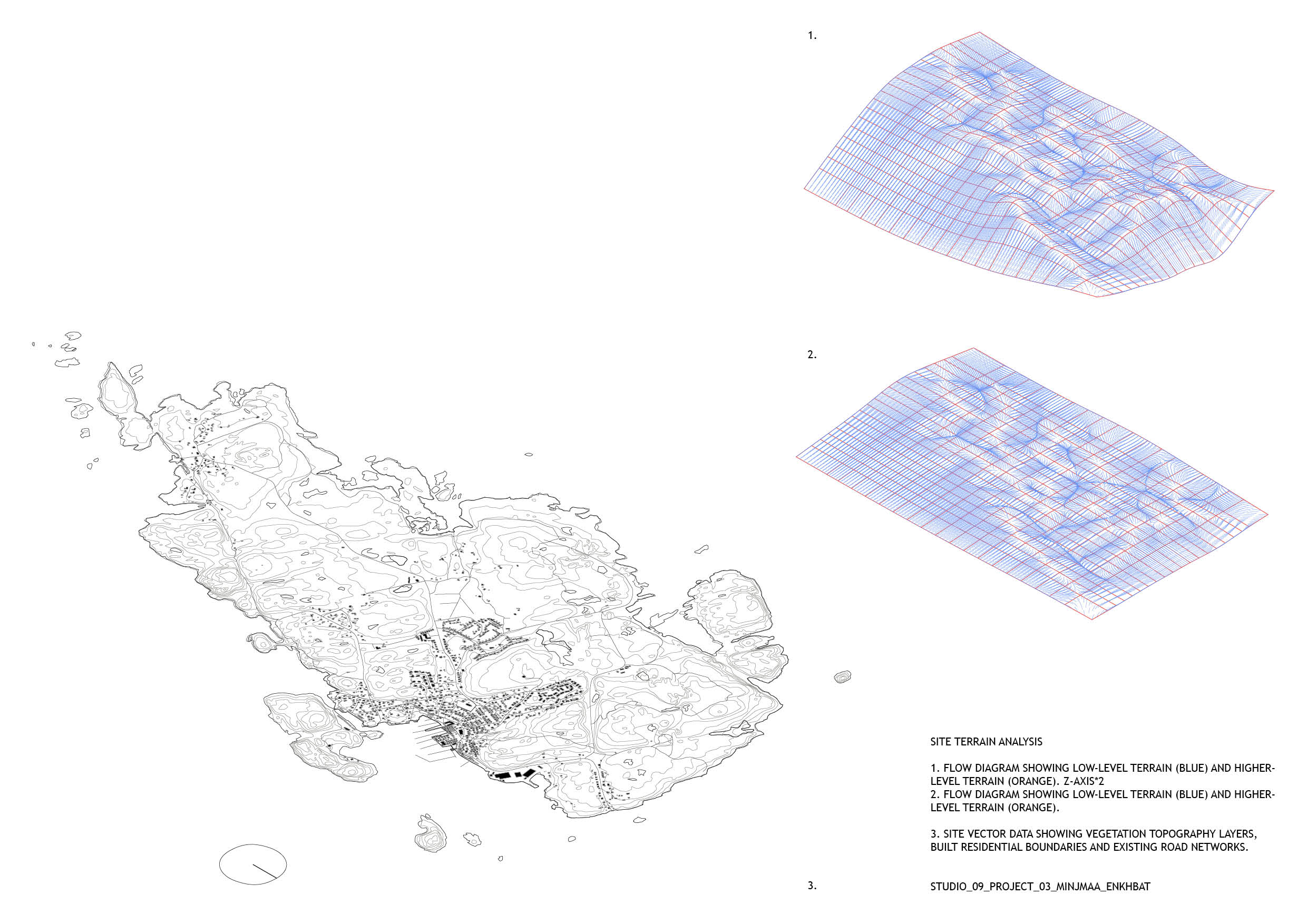
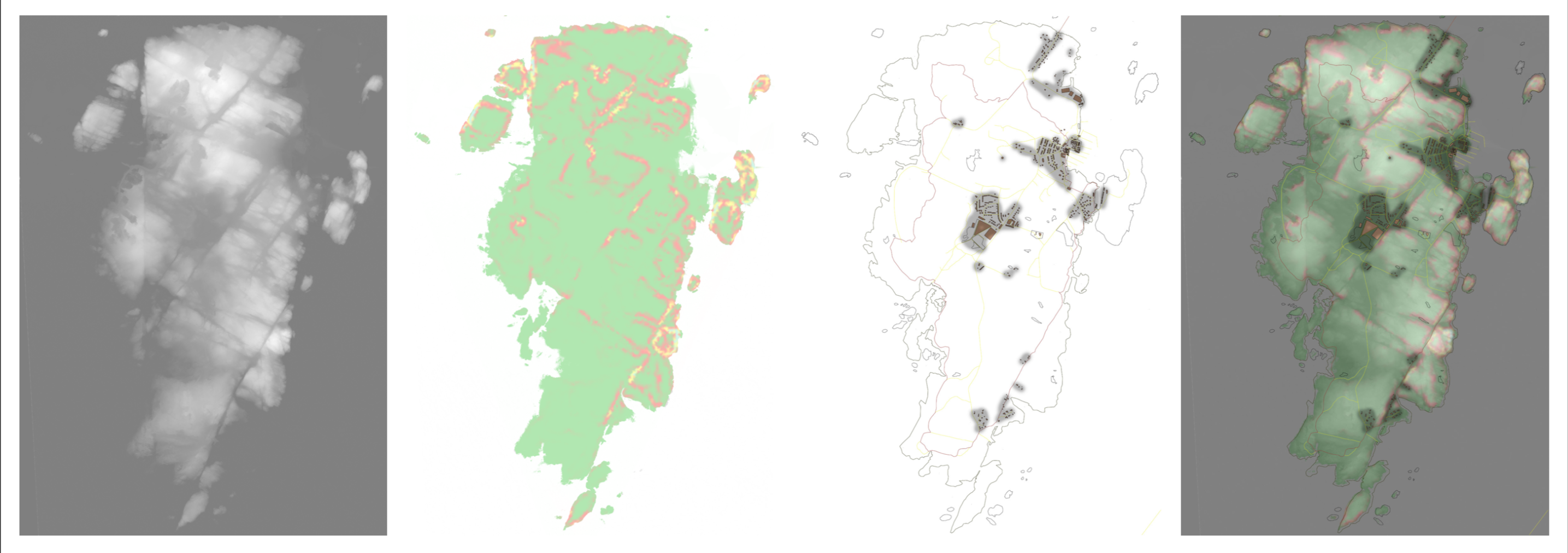
As a starting point to the design proposal I used Photoshop, Grasshopper plug-ins and Lidar data to create a terrain analysis, showing greenery, water slope directions, height map etc.
As a starting point to the design proposal I used Photoshop, Grasshopper plug-ins and Lidar data to create a terrain analysis, showing greenery, water slope directions, height map etc.
Studio 9_Project 3_Task 2: Occupations and Interventions.
To occupy the site I began by collecting and analysing site data for Malmön. The program QGIS for editing and analysing geospatial information was used to extract the vector information; topography, population and marine geology. A colour png map provided the basis for extracting the 3D terrain data using a python script and into Rhino, with initial topography analysis through flow diagrams in grasshopper. A photographic study was also carried out and compiled into a booklet.
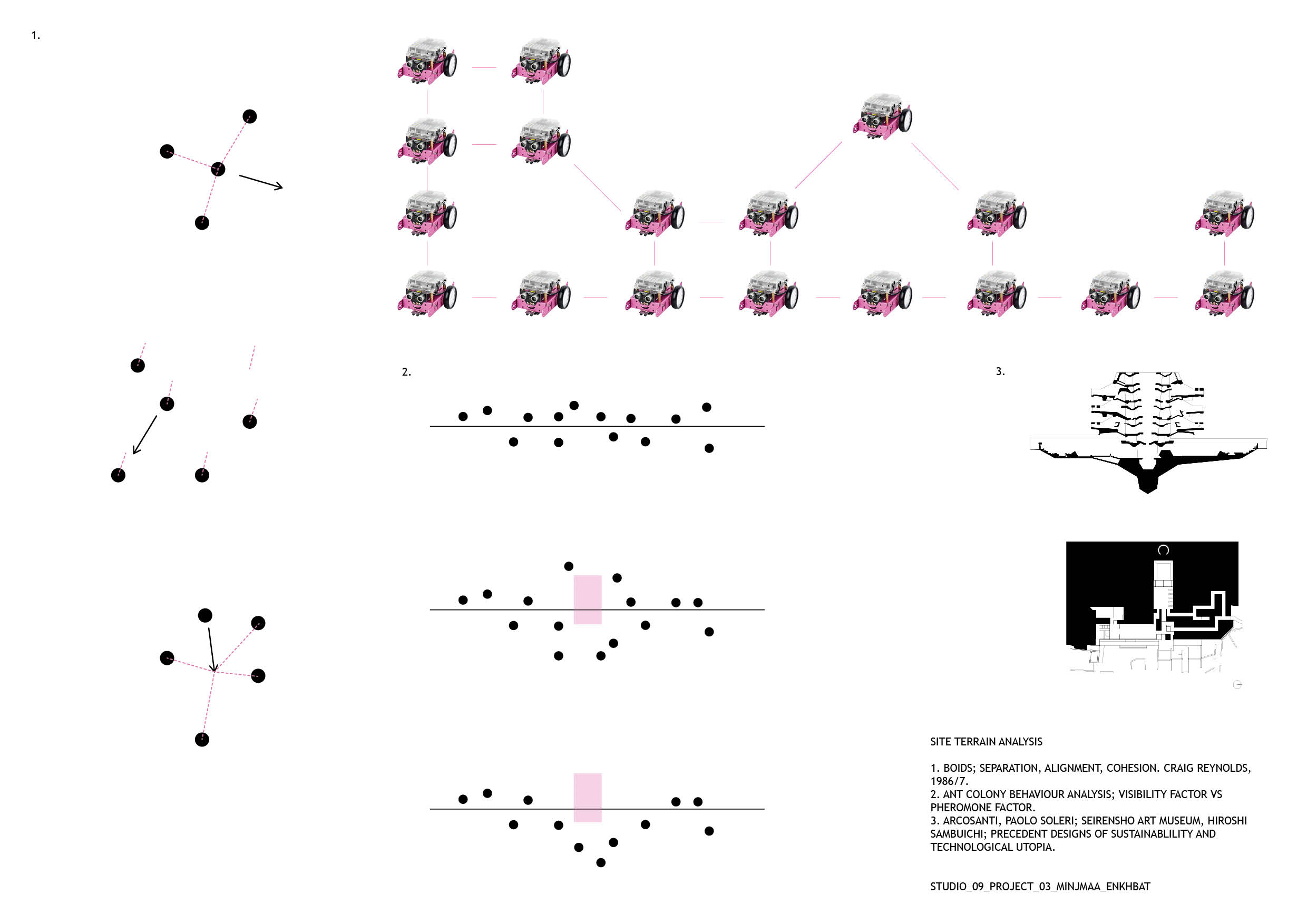
The intervention aspect was based heavily on ABM research – agent based models. An agent is aware of its surroundings and its abilities. When acting in a collective manner they exhibit swarm intelligence, the collective behaviour of decentralised self-organised systems. This means each member autonomously offers its abilities in order to study an overall system. The members, or agents, self-coordinates without a leader and cooperate in solidarity resulting in a self-healing system. This allows members to be added or removed dynamically as the agents will recalibrate in a constant feedback loop.
‘Boids’ by Craig Reynolds was the grounds for my research into swarms and flocking behaviours for computer simulations. His theory is a basic flocking model consisting of three steering behaviours; separation, alignment and cohesion. Ant colonies that organise using pheromone and visibility factors were also part of the initial studies.
I would like to base project 3 on the collection of site data using agents and subsequently allowing the agents to alter the collected data in order to intervene and implement the summer camp design on Malmön. To engage with this theory in the material dimension, I decided give form to the agent as a mini Arduino robot name Mö. This allows for real-time feedback with the tests I run for the agent simulation on site. Giving robotics agent behaviours has its own research and theory basis. Although Craig Reynolds theory of Boids is a great foundation, I also studied vehicle behaviour and coding in ‘Vehicles: Experiments in Synthetic Psychology’ by Valentino Braitenberg. Processing and Arduino will be the main programming softwares, with C and Java as scripting languages. The Nature of Code on youtube and Github, as well as Studio 09’s own processing tutorials have been great learning platforms for this.
My initial interest in participatory design led me to start working with multi agent systems. The idea that consensus emerges without anybody actually taking charge or leading the group felt like it might have an interesting analogous connection to questions of democracy (and I also found Grasshopper plugins that seemed fun to try), so I decided to go in this direction.
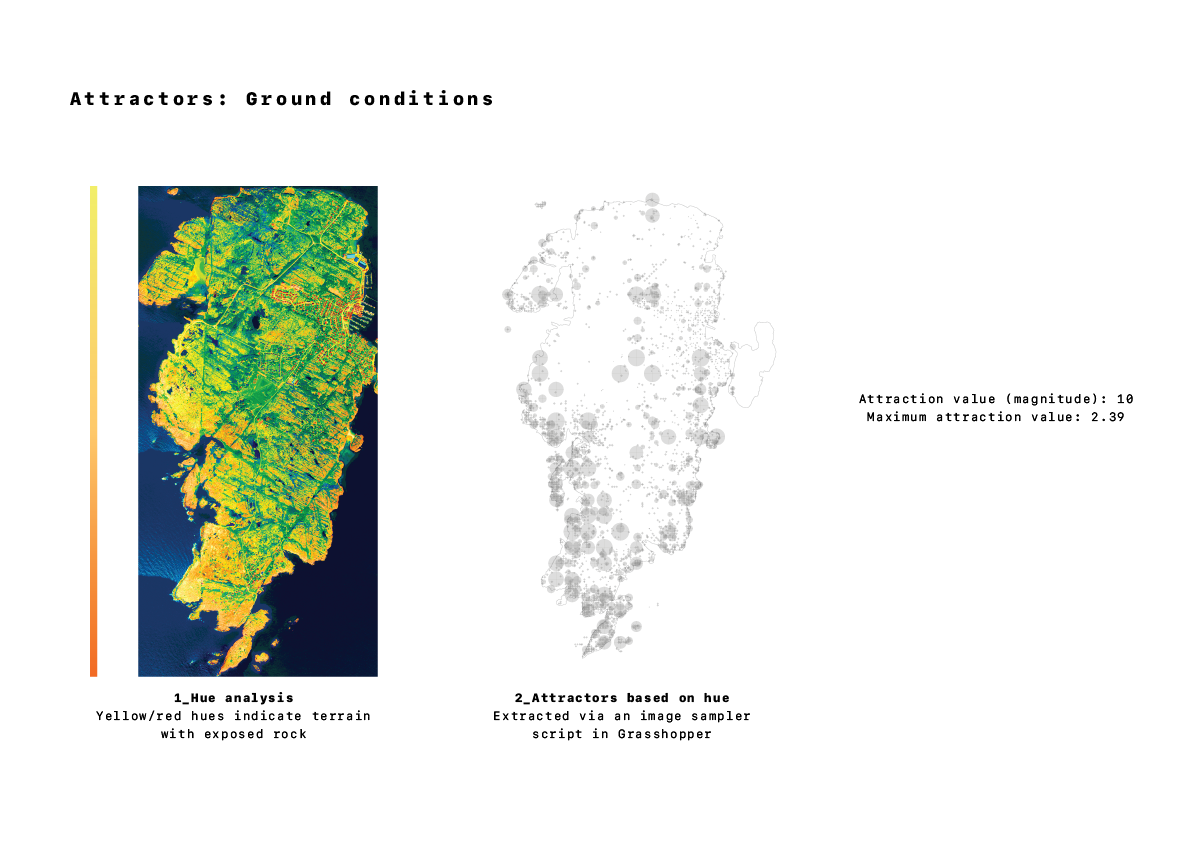
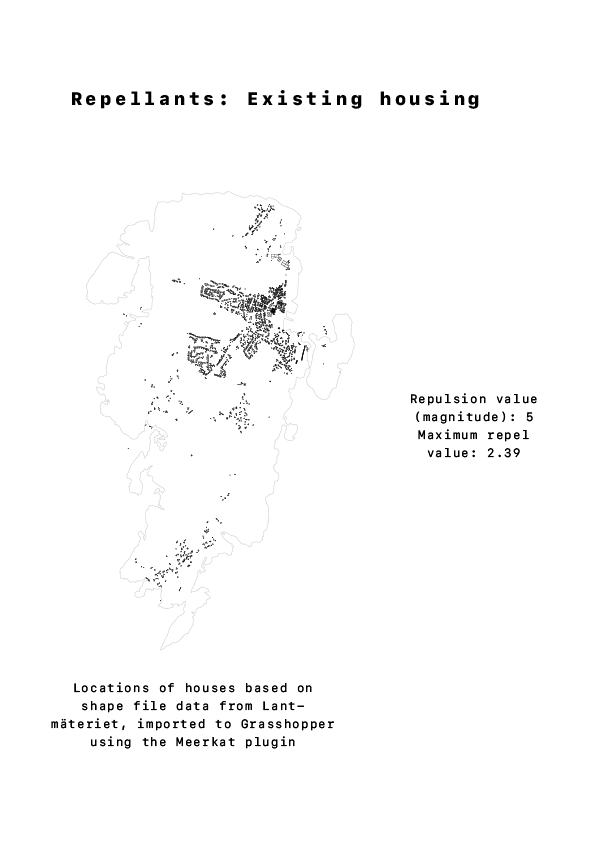
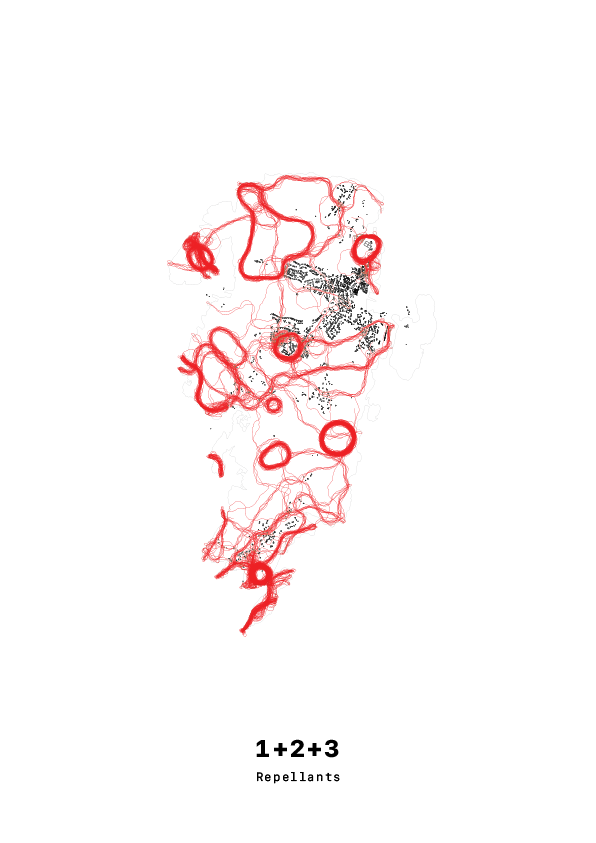
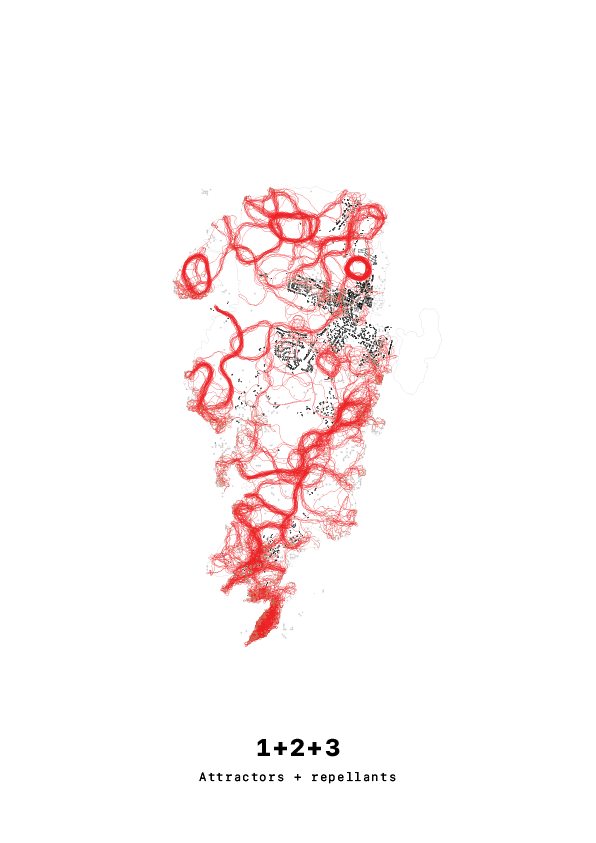
The agents are programmed to have several concurrent behaviors, the main ones being attraction and repulsion. After starting to play with the idea that the agents were in fact aliens out to colonize Malmön (and laughing out loud at my own silliness) I got the ideas that the repellants would be the existing housing on the island and the attractor points certain terrain conditions. Obviously, aliens want to keep their colonization efforts secret from the humans on the island, and they are here to gather data on the granite that is so abundant in Malmön…
Moving on, first of all I want to see how I can take the concepts I’ve worked with so far from 2D to 3D. Furthermore, I’m also thinking about experimenting with a hierarchy within the swarm; the brief includes 5 ”camp leaders”, something that both works well with my hypothetical alien colony situation and could potentially generate interesting results depending on how the leaders and the swarm interact with each other.
After a brief look at the site and requirements of the brief, I set out 3 key criteria for selecting a location for the campsite:
Away from existing buildings
Interesting variations in topography
Close to water
By using the height map from Lantmäteriet to analyse steepness, and a plan of the island from Openstreetmaps, I was able to overlay this information and select a suitable site.
The region that best fits my criteria is the land surrounding Dödviken, or the “Bay of Death”, on the North West corner of the island. A closer look at the geometry of this area shows that it is a cluster of islands that enclose an inlet of water- which could create a boundary and give the water a feeling of enclosure and privacy.
Site Selection
For this reason, I would like the core circulation of the camp to take the form of a loop- picking up on existing ridges in the landscape and crossing the water in the most feasible locations to create a continuous path around the water.
Creating a loop
By projecting this loop onto the site, and unfolding it into a straight section, I can start to analyse and populate the camp along this linear (but looping) path.
Unfolding the loop
The terrain varies quite dramatically across this route, both in altitude and type, crossing highs and lows, rock, trees and water. The idea is that this path be constant throughout the campsite, and provide access to the spaces and places along it which accordingly respond to the landscape. By taking the average altitude along the section for the path to sit along, it either takes the form of a bridge, tunnel, or just a path, depending on its context.
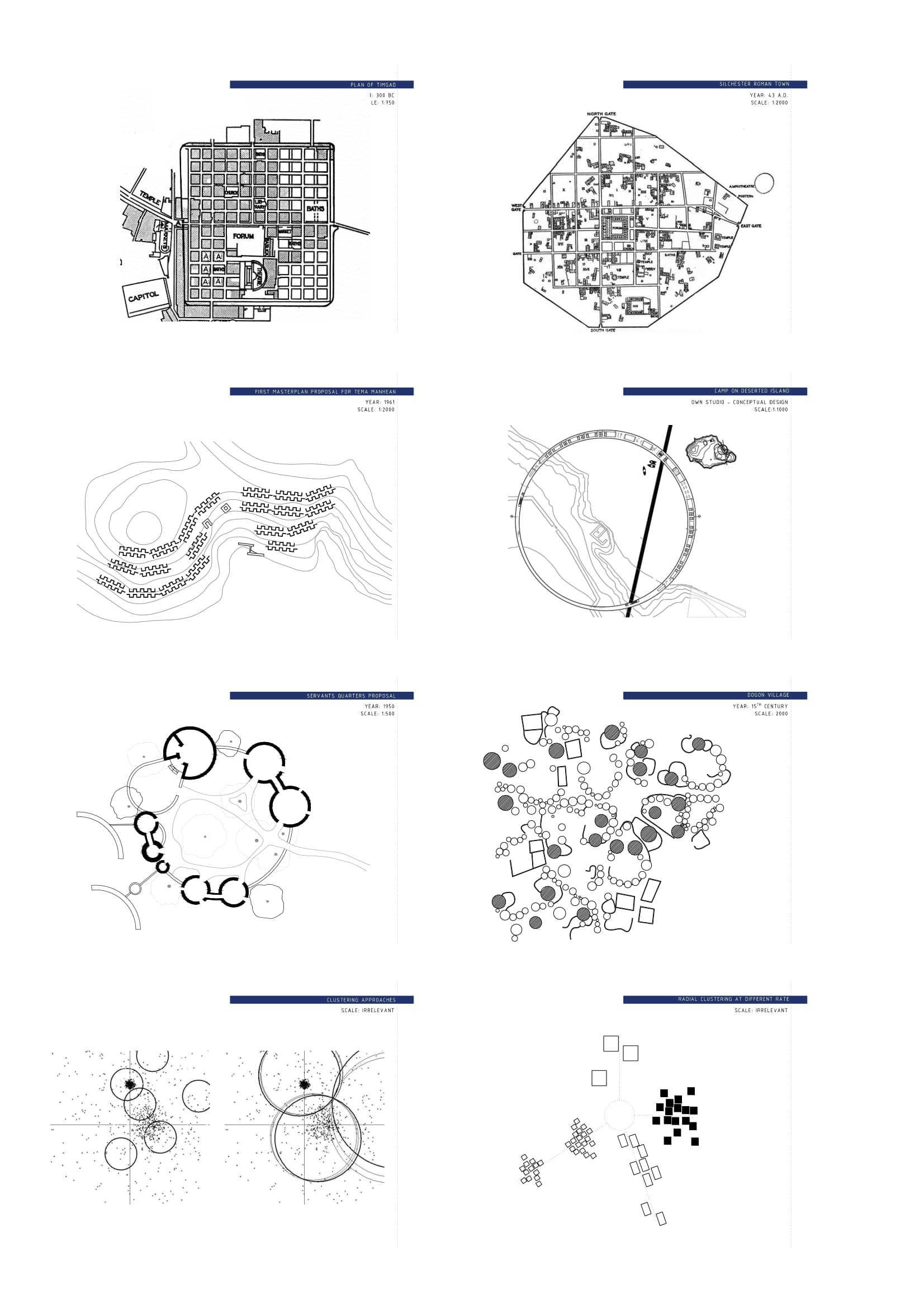
I was looking at spacial configurations of some buildings in a complex ground conditions. First row: spacial distribution of separated units. Second row: Different approaches to work with the terrain in section.These references are showing a different approach with the program being built on a small area as a closed cluster or a multistorey closed building.
The roman town Silchester is an interesting case if we analyze it at three scales. It can be seen through its irregular border containing strictly divided cells with ‘random’ clustered buildings in each. What fascinates me is the ‘logic randomness’ that is completely unexpected if we compare it to the rigorous meticulousness of roman military camps. Nevertheless, with some effort one can start to detect logical patterns and that is the first approach that I would consider in this project.
Another way of thinking about a camp is to have a predefined building element that will be repeated according to a certain parameter. Or we could take a predefined shape and fit the element in it. I have previously considered this approach in a similar studio program, and this is why other ideas are more compelling for me.
The approach I find the most fascinating is to observe clustering in every layer of ‘making’ architecture. What if we could define a path around which we would cluster buildings, object, elements and atoms? Or what if we could use clustering in a broader sense and try to cluster these predefined paths too? I would like to test the k-means clustering method on the given terrain to find areas satisfying certain parameters. Than it would be exiting to observe clustering in different directions and rates depending on the program and the needs. Although this might not lead to a successful solution, I am interested in exploring such potential.