Master thesis final submission
Compression-only based structures.
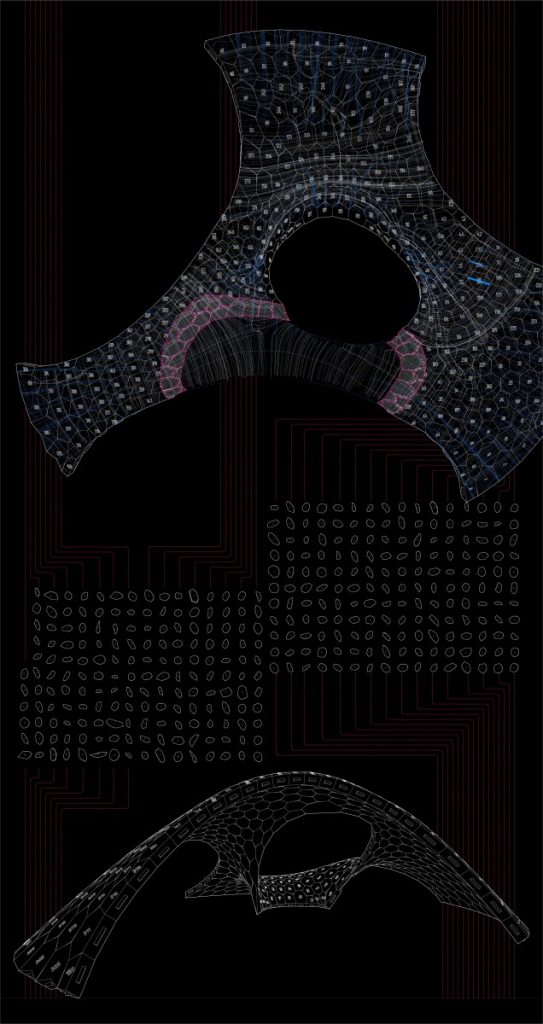
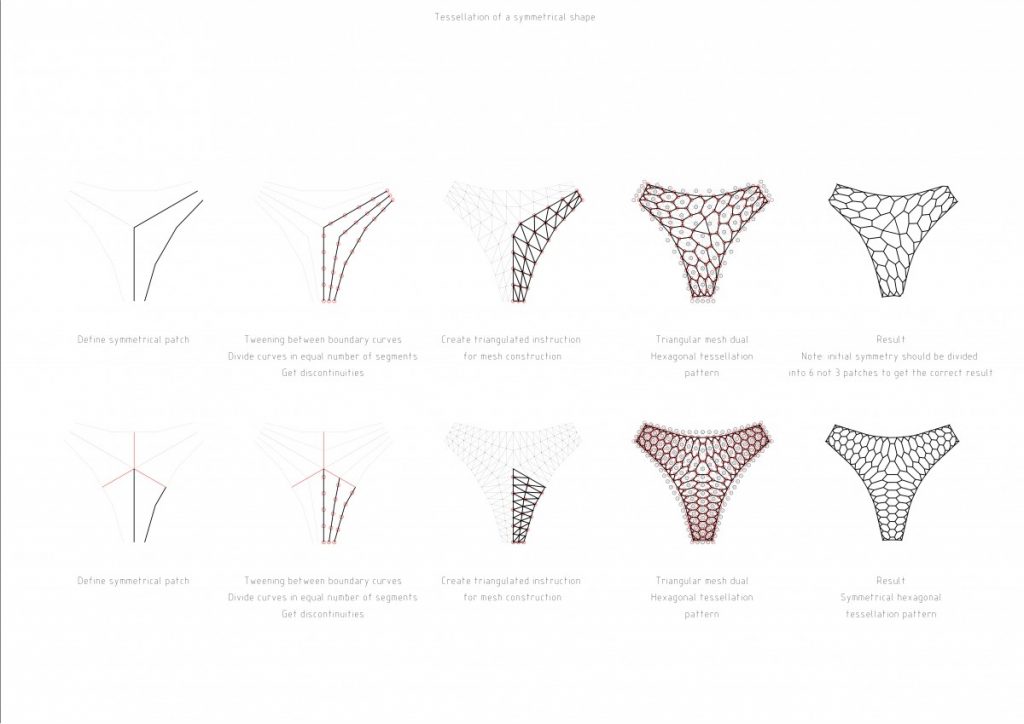
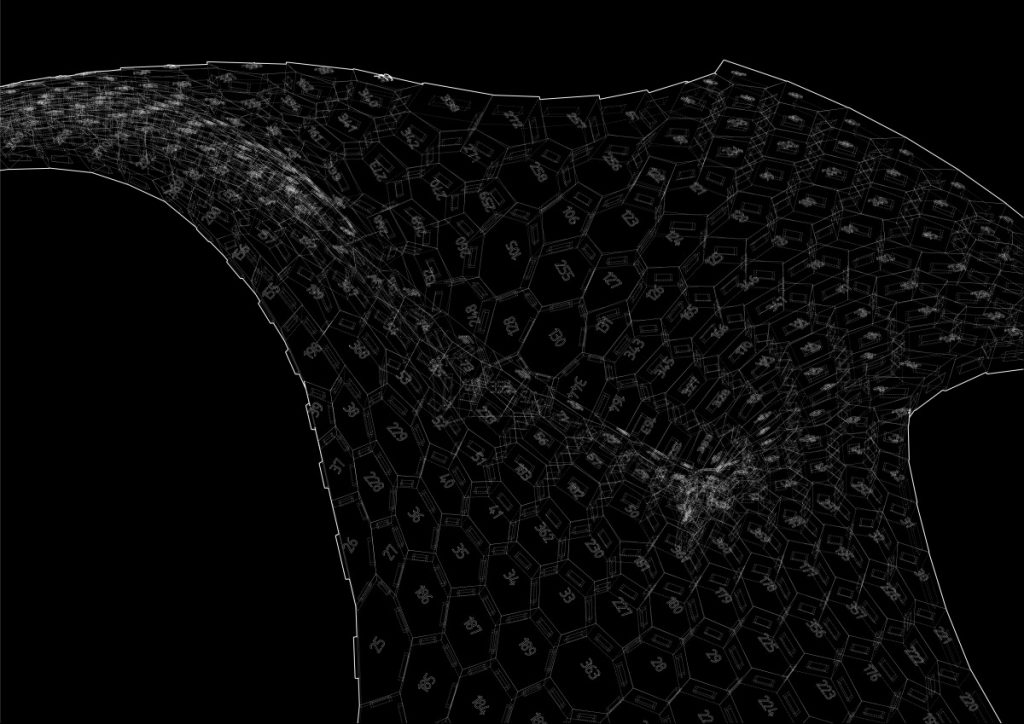
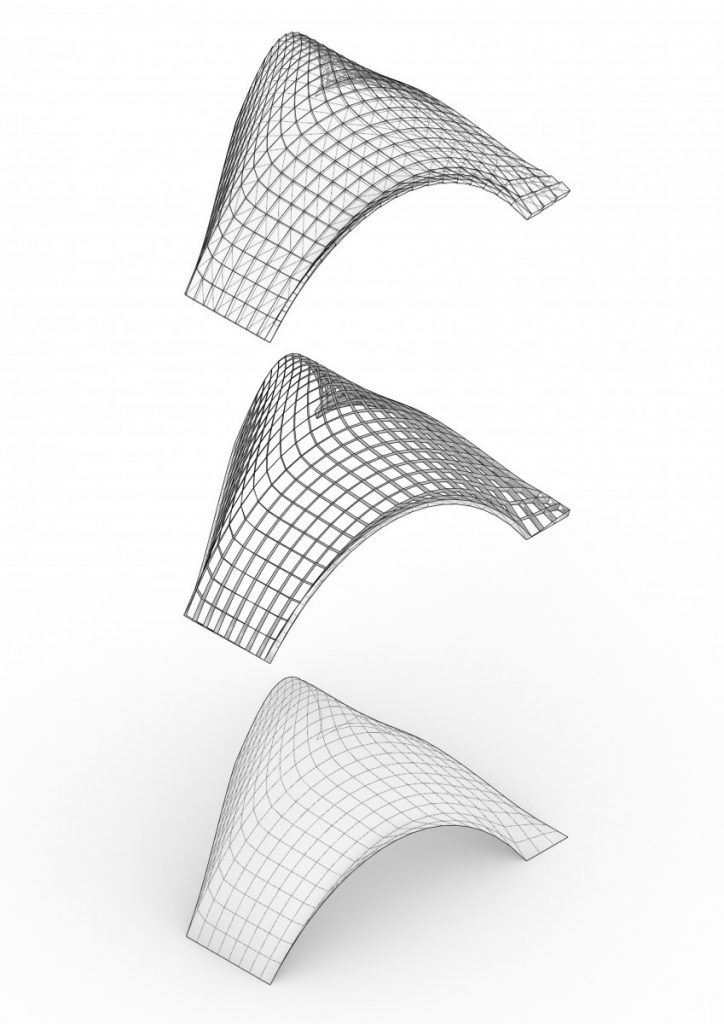
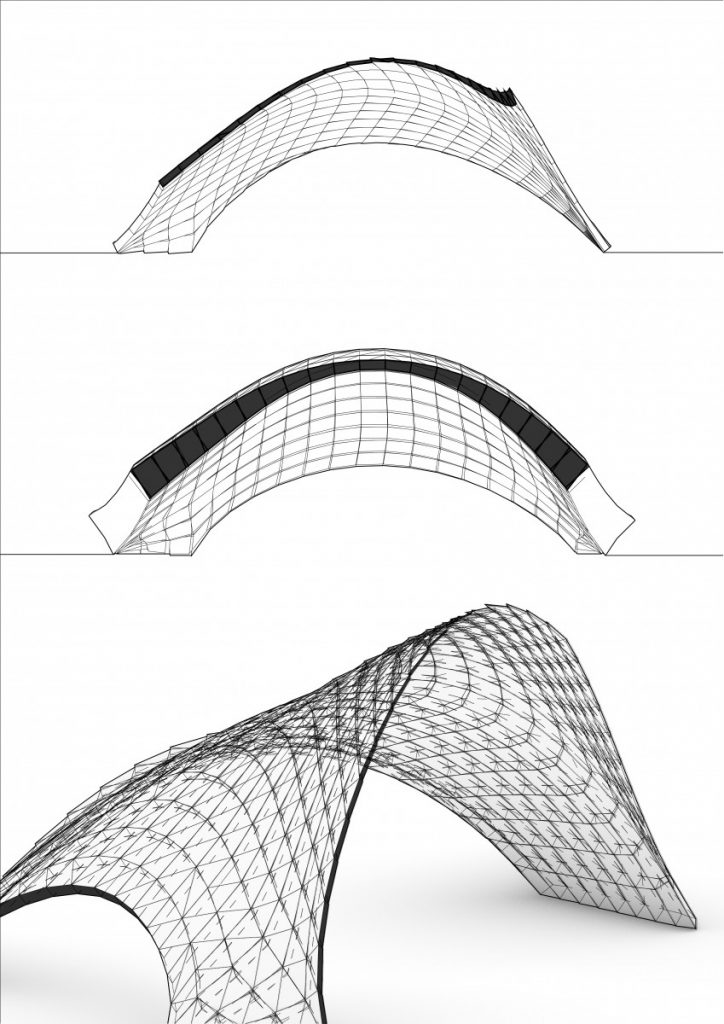
Discrete element assemblies, double curved surfaces, shell structures, mesh tessellation and digital production
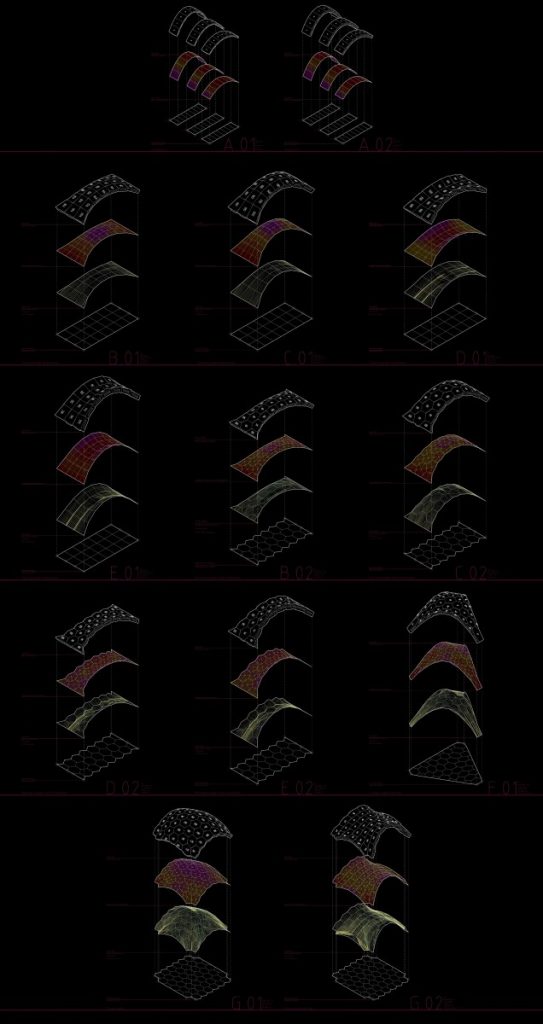
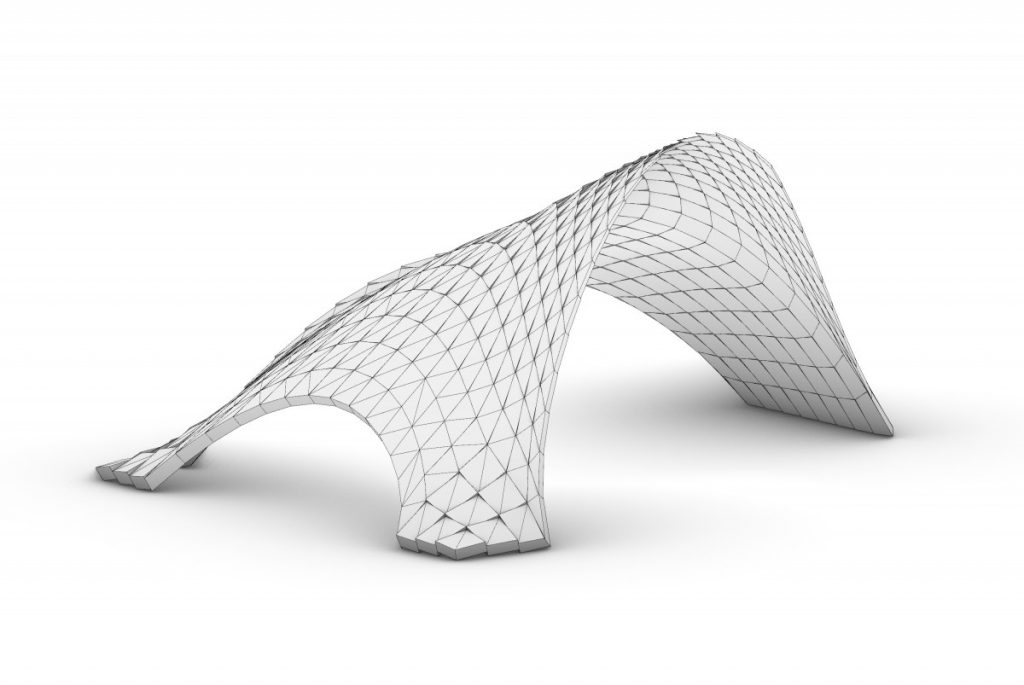
This master thesis is a research based project which explores compression-only based structures, covering such subtitles as – discrete element assemblies, double curved surfaces, shell structures, mesh tessellation of symmetrical and asymmetrical geometry together with digital production used for testing structural behavior of masonry structures.
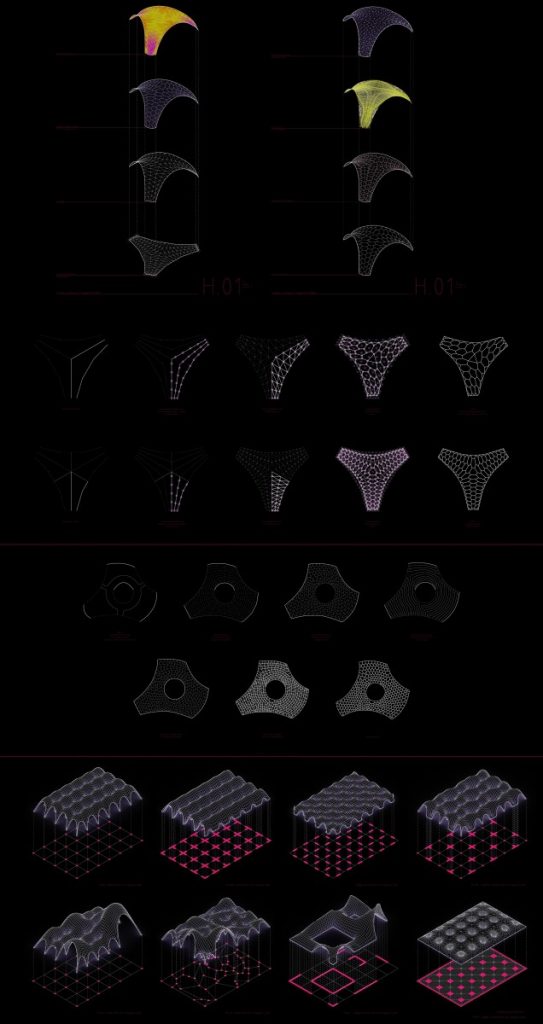
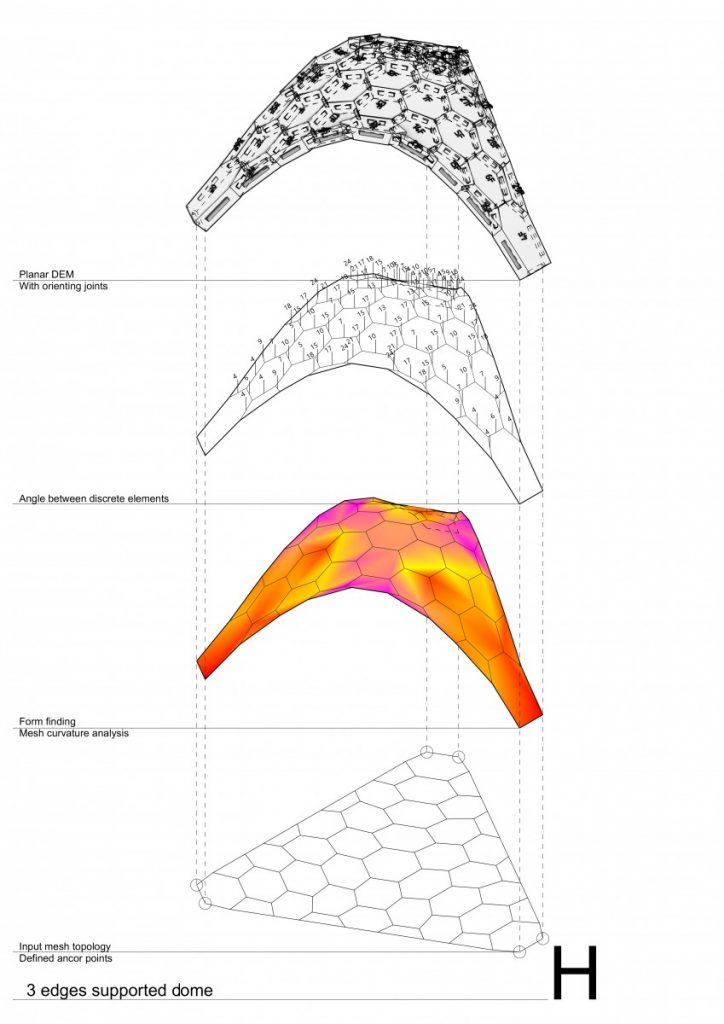
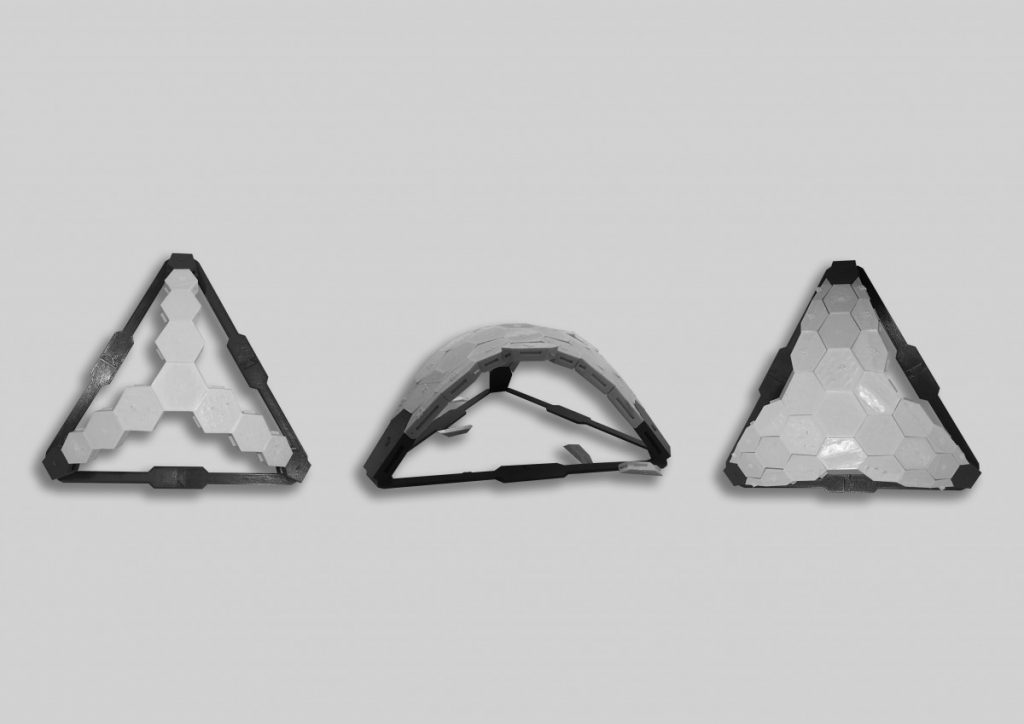
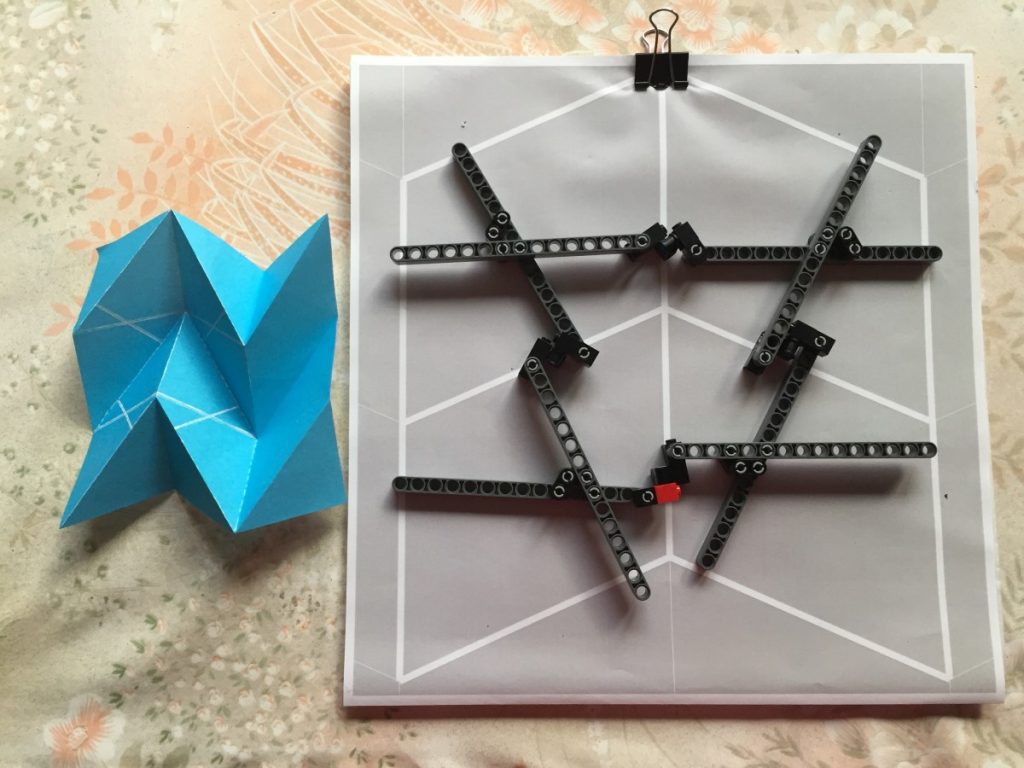
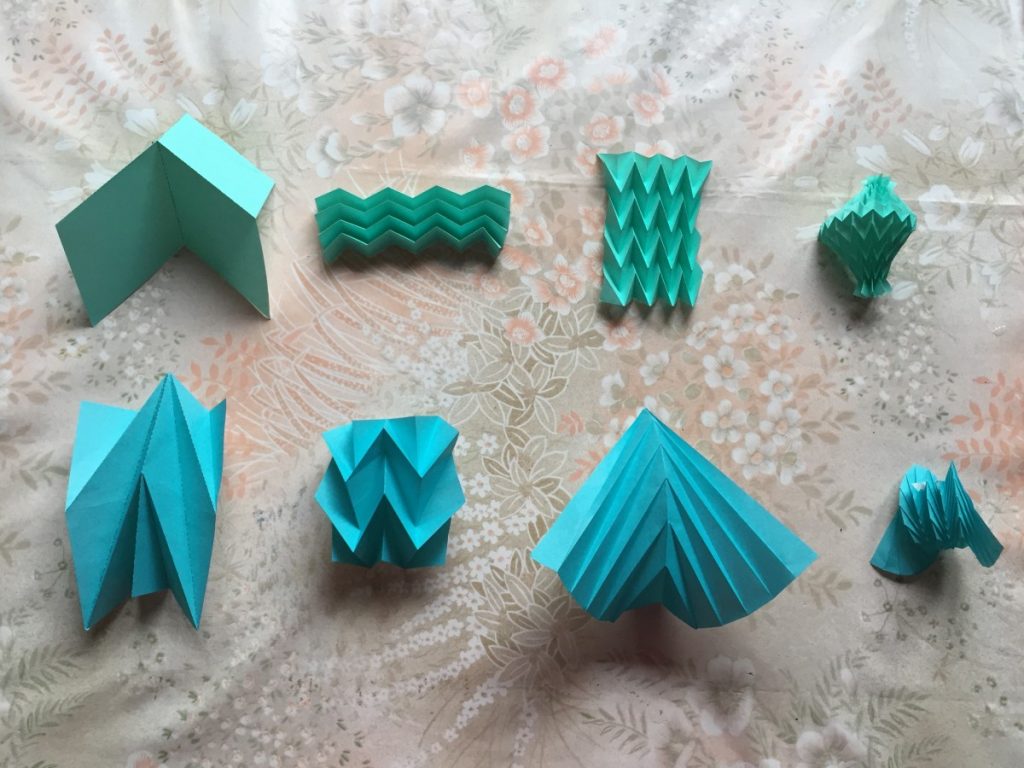
The background of the current research project was based on the works of Block Research Group. During this stage two different softwares were analyzed in comparison to each other (RhinoVault and Kangaroo2 for grasshopper) and the physical model of both structures was made. First experiments as compression-only based physical models were 3D printed from PLA and failed. Moving forward the further research methodology was developed – to start testing from simple structures – like arches and step by step by adding different variables explore the complex systems such as vaults, domes both single and double curved and finally – symmetry and asymmetry. This comprehensive analysis from the simplest element – arch to the most complicated sample – asymmetrical free form vault helped to deepen an understanding of behavior of such structures while testing the impact of thickness, curvature degree and curvature type, tessellation type and joints between the elements design.
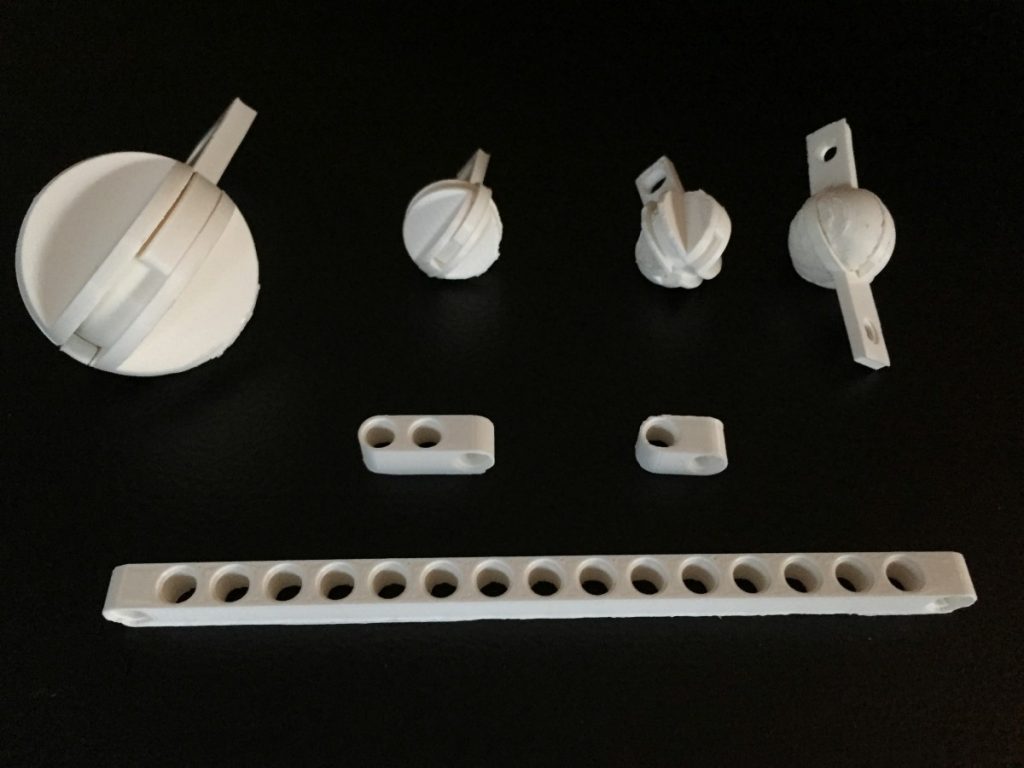
Furthermore, project covers digital production and fast prototyping techniques – 3D modelling, parametric modelling and 3D printing together with all challenges which can occur during translation of digital model into the physical model.
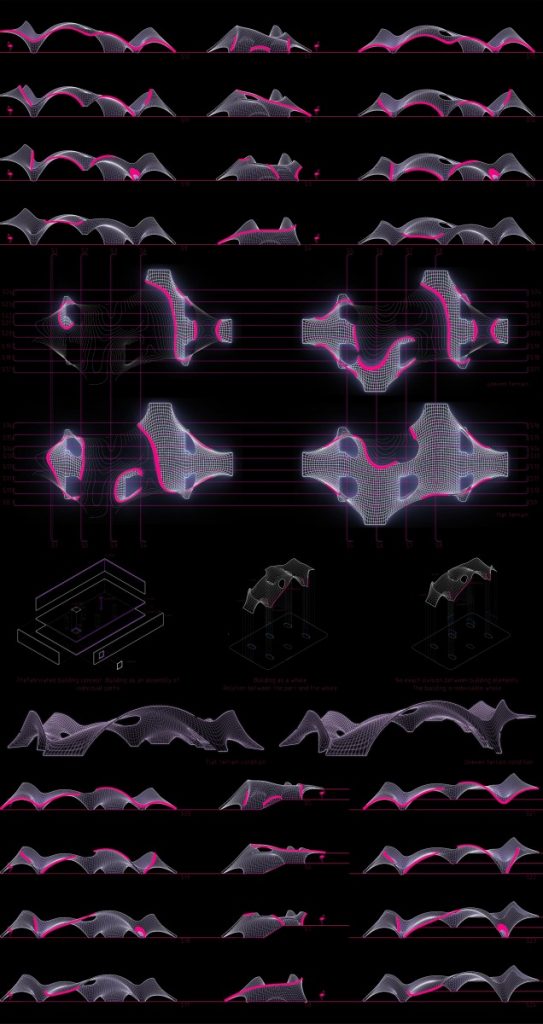
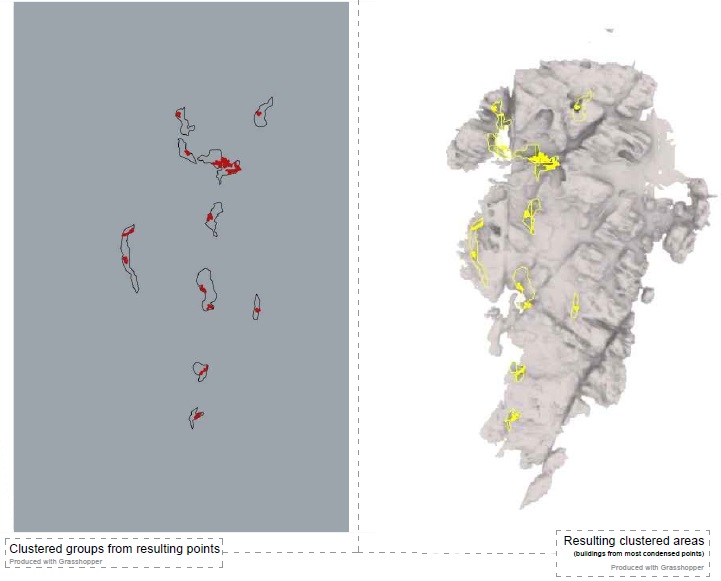
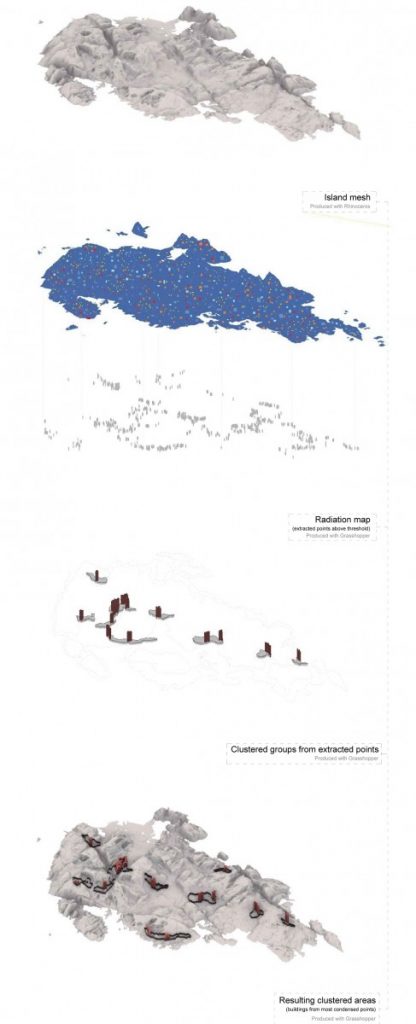
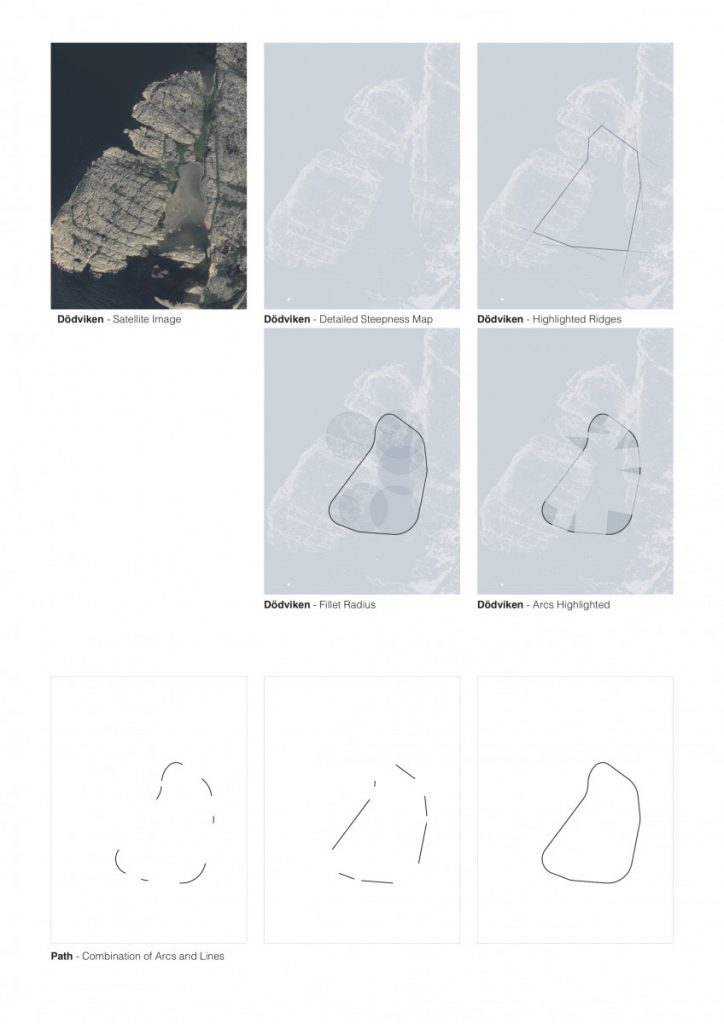
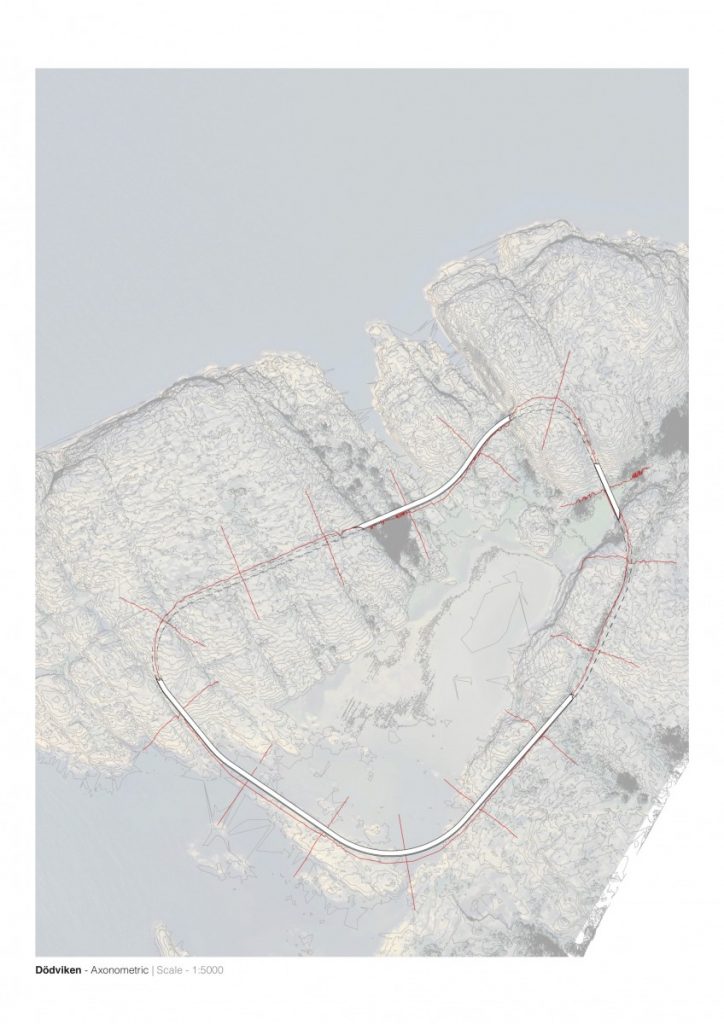
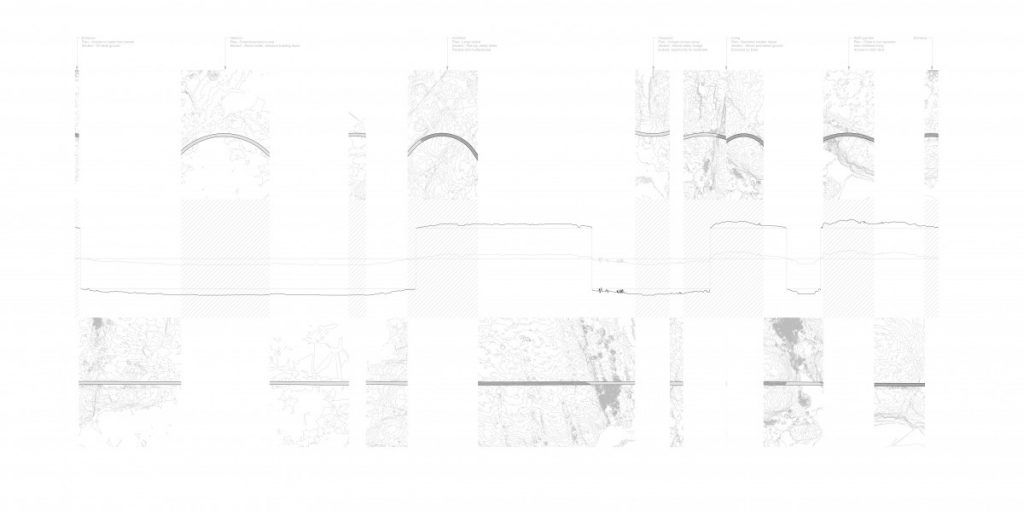
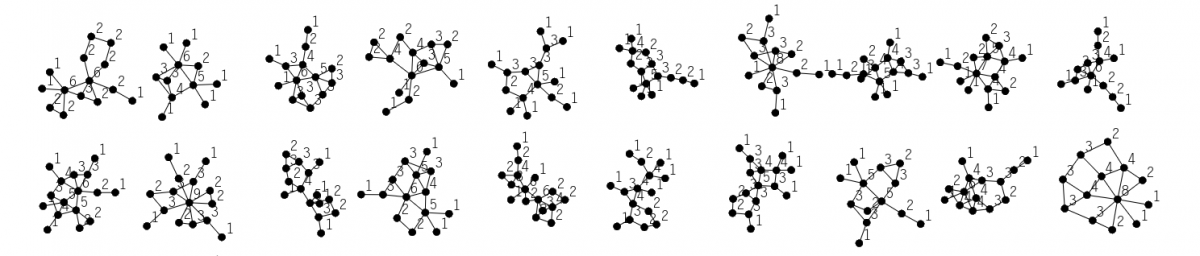
Conclusions of the research project and implementation into the architectural field are proposed as analysis of adaptation to flat and uneven terrain, together with the analysis of different possible combinations of shell structures into the one whole system called mereology – in philosophy and mathematical logic, mereology is the study of parts and the wholes they form.