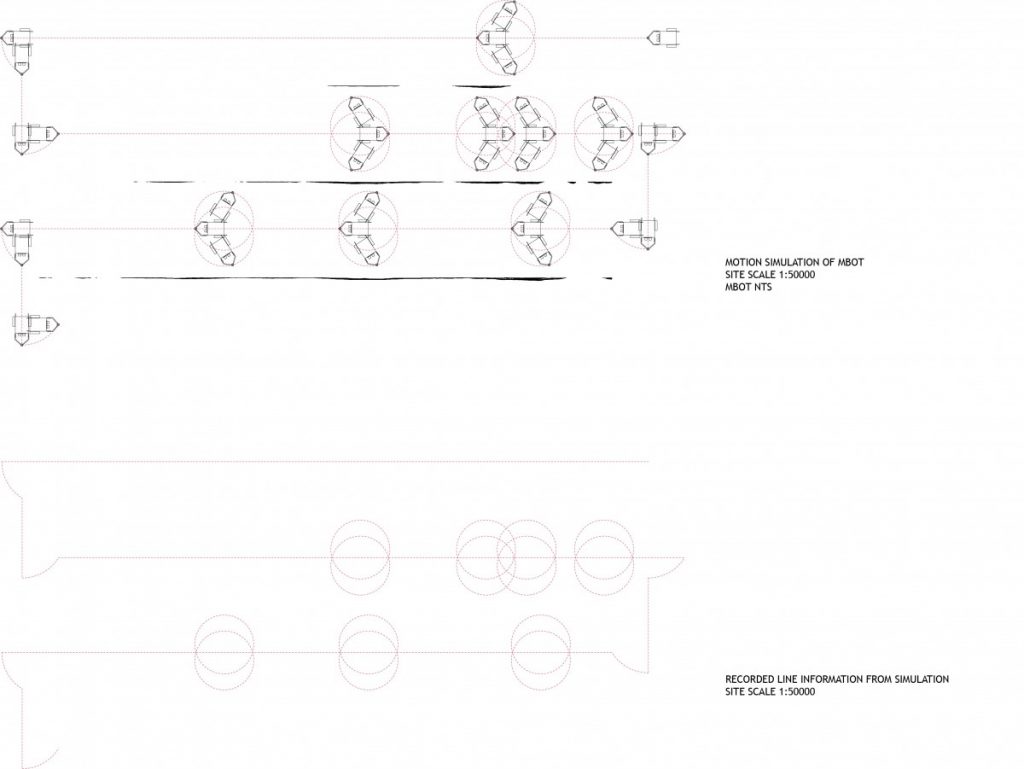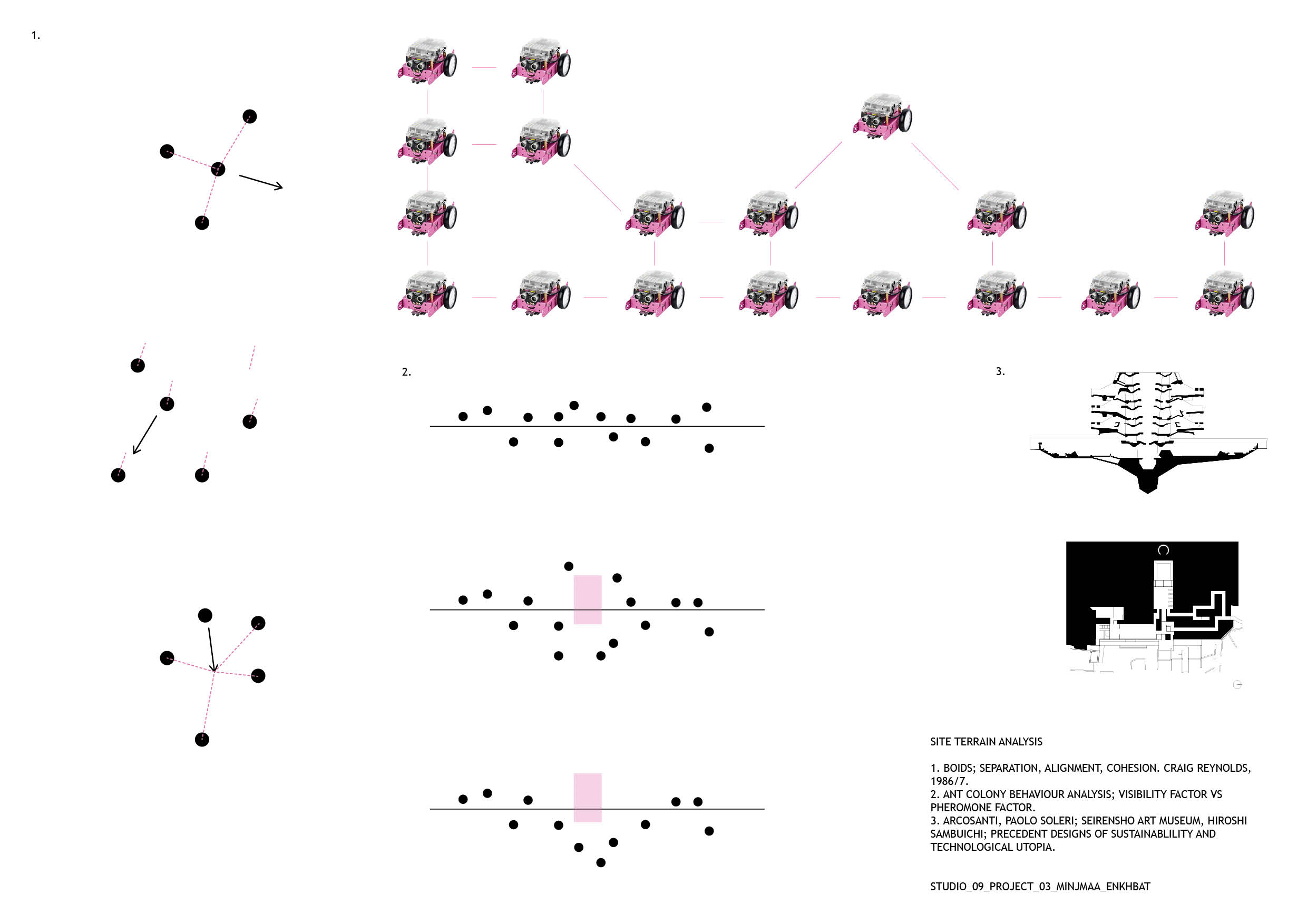
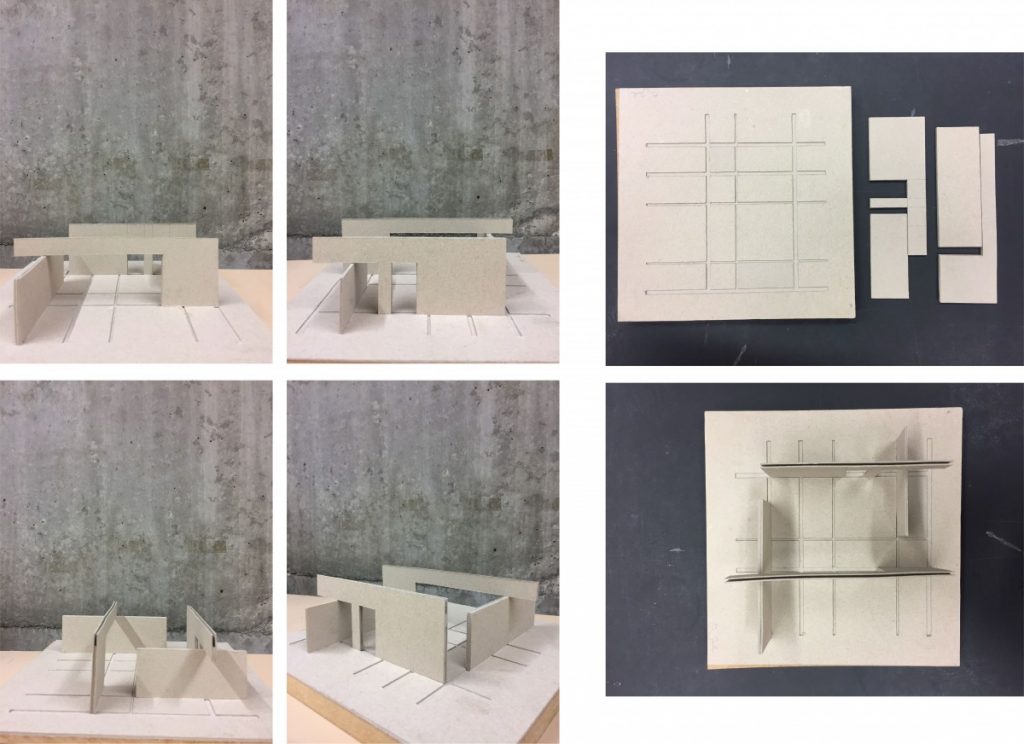
The robot allows for direct feedback for the design strategy proposal. In oder to fully apply this method of working I formulated a strategy for the summer camp as an initial system of production, construction and form to allow for freedom in testing.
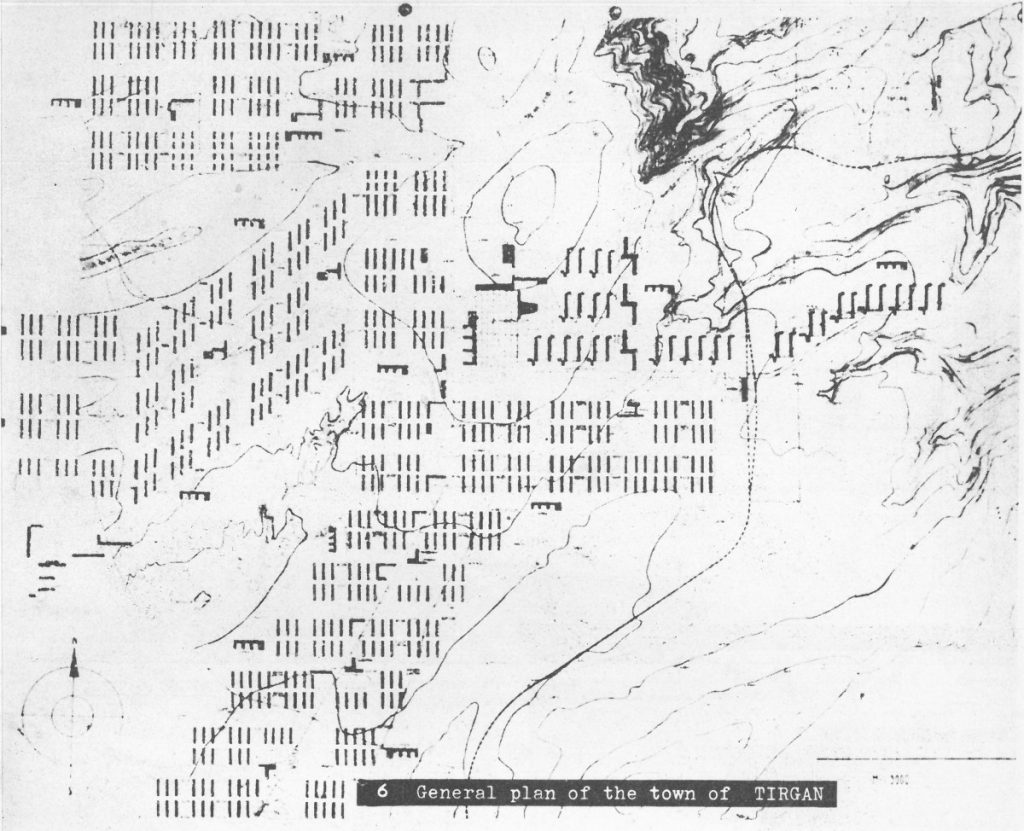
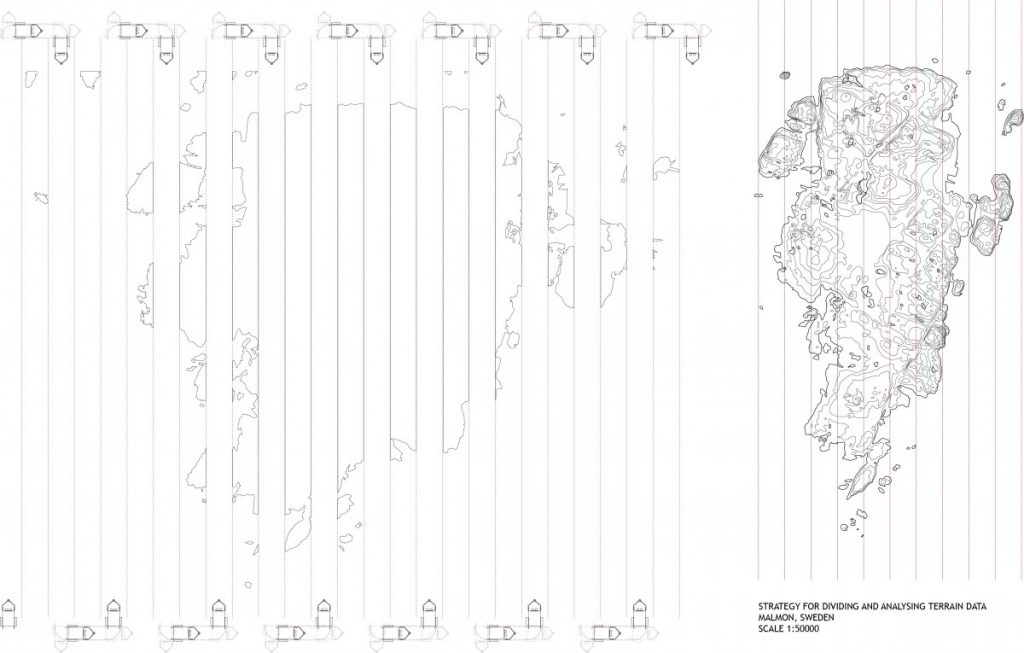
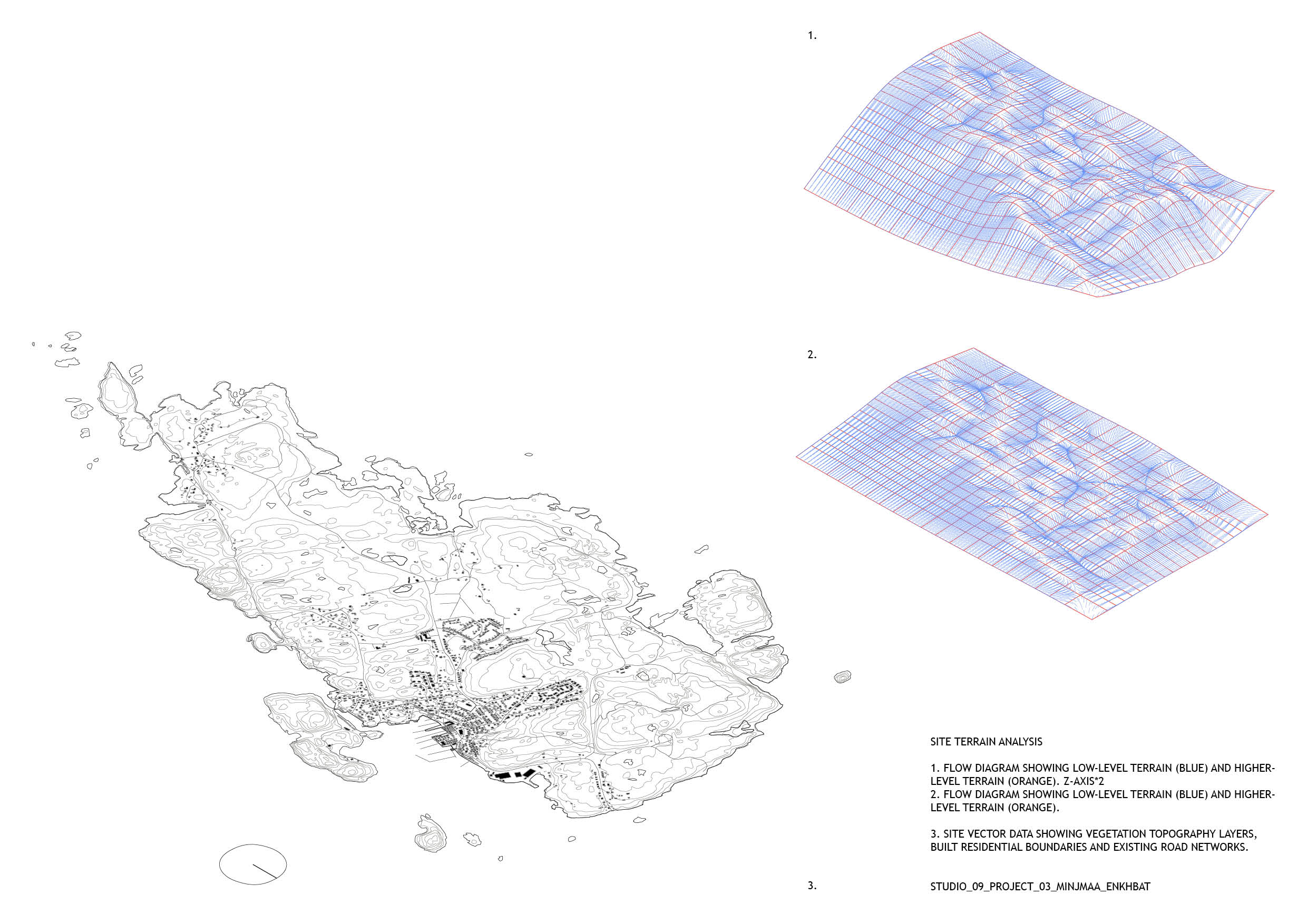
I took the soviet architectural town planning in 1930 by E. May as precedent. The linear markings on the site appears to respond to the context yet also offer an abstract notation of the program of development. The summer camp proposal for Malmon will be about setting up a grid that will be the groundwork for precast members that can easily be assembled and disassembled. Concepts of sustainability and impermanence are suggested.
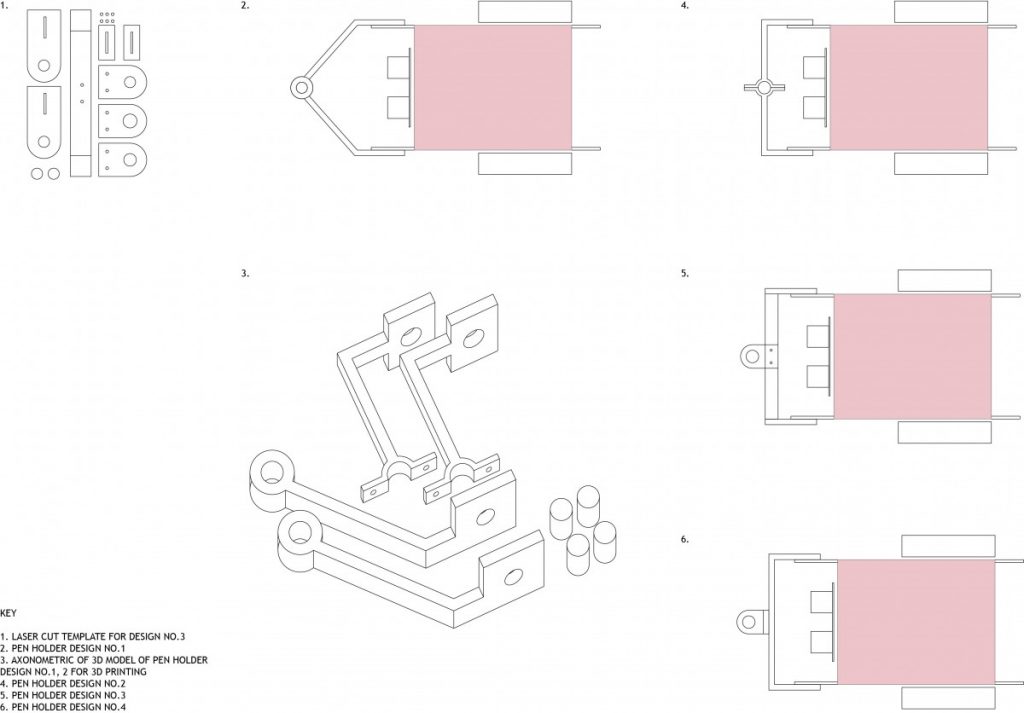
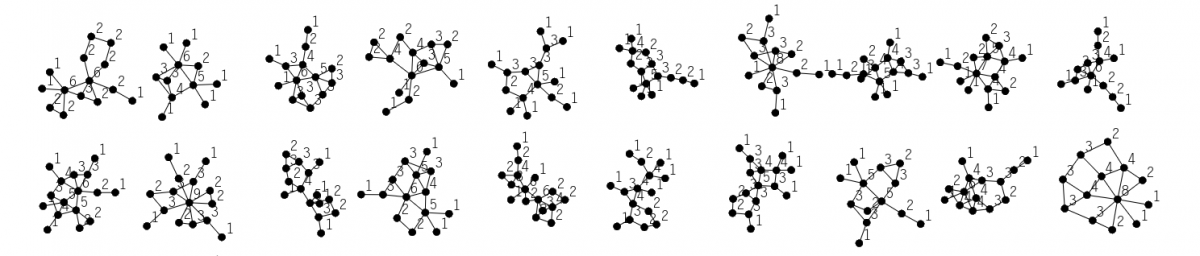
To obtain an output from the robot I 3D printed a set of arms/ pen holders to obtain a line drawing from the site analysis. While the robot scans the site, It would produce a line drawing as a data output. The implementation was dictated by the robots sensors, size and my coding capabilities. I did not achieve an outcome that could be presented or represented the idea. For the final task in this project I will work towards focusing on what data I want as an output and a much simpler application of the robots abilities.