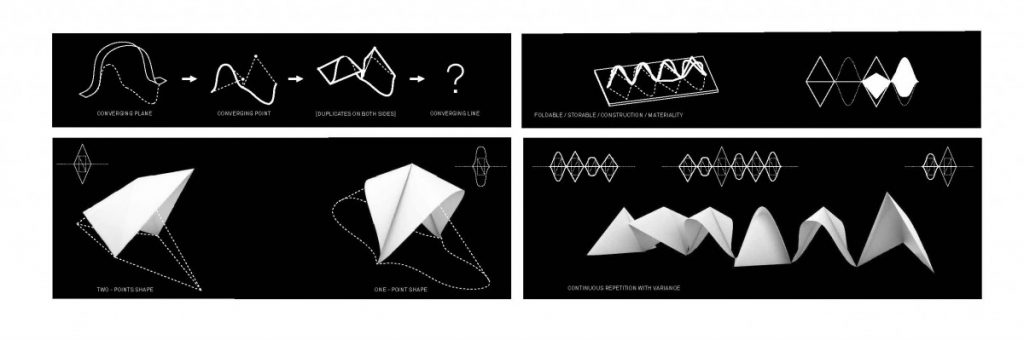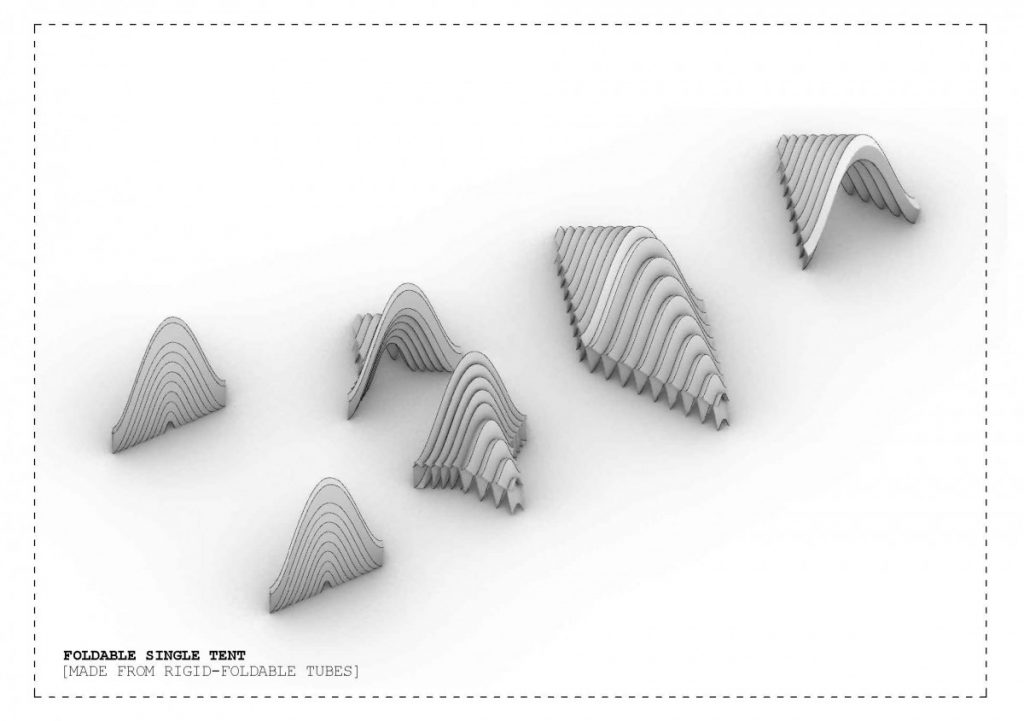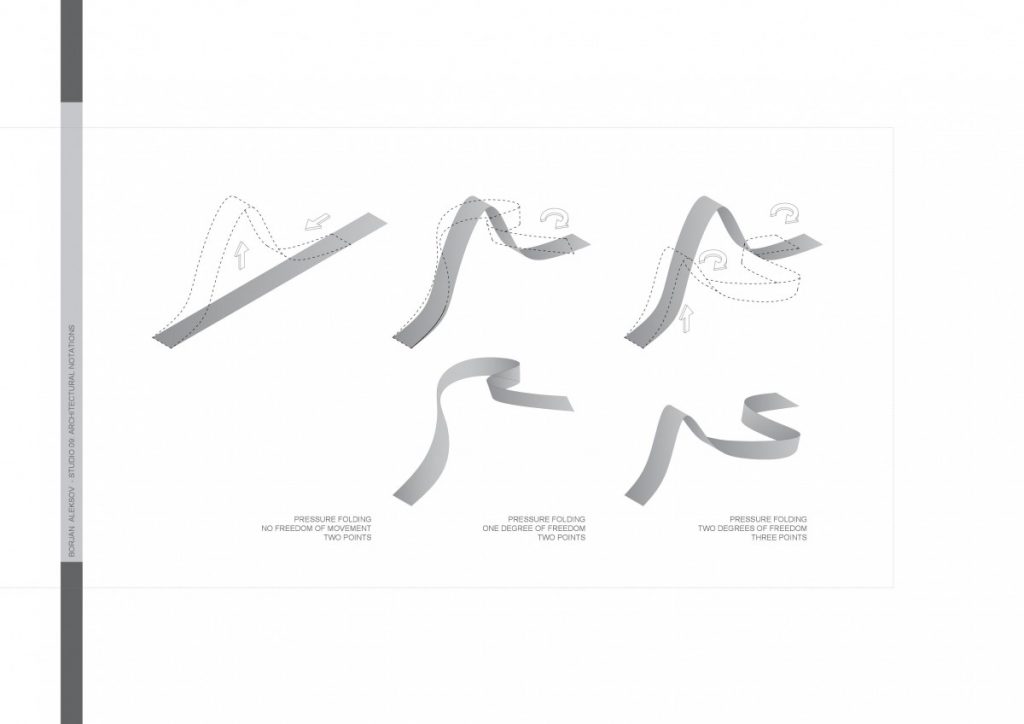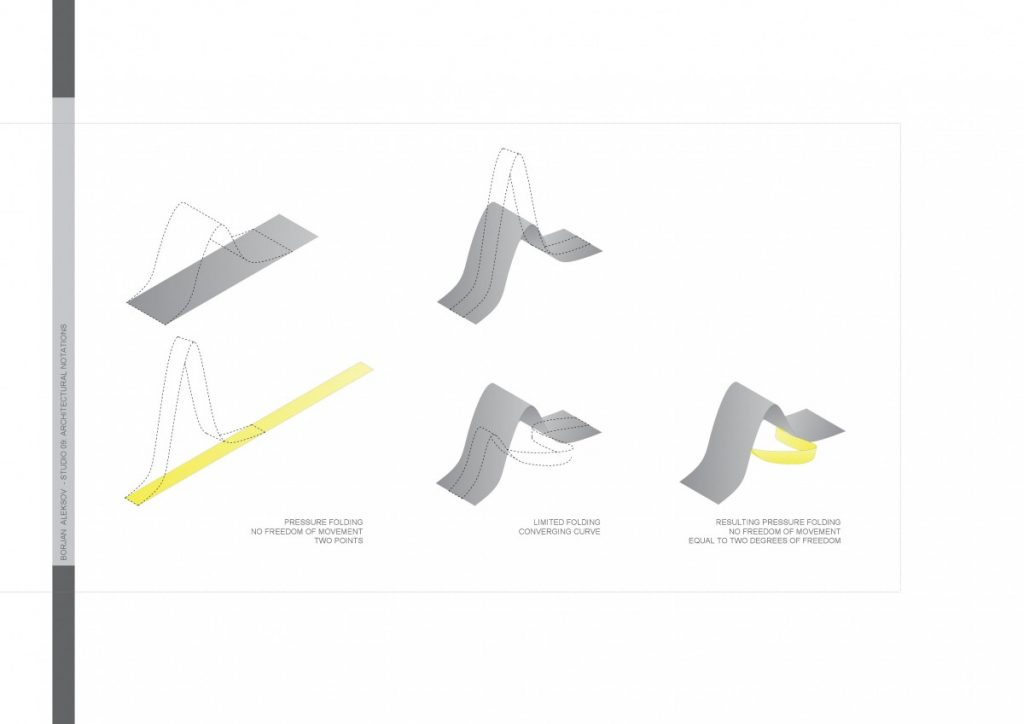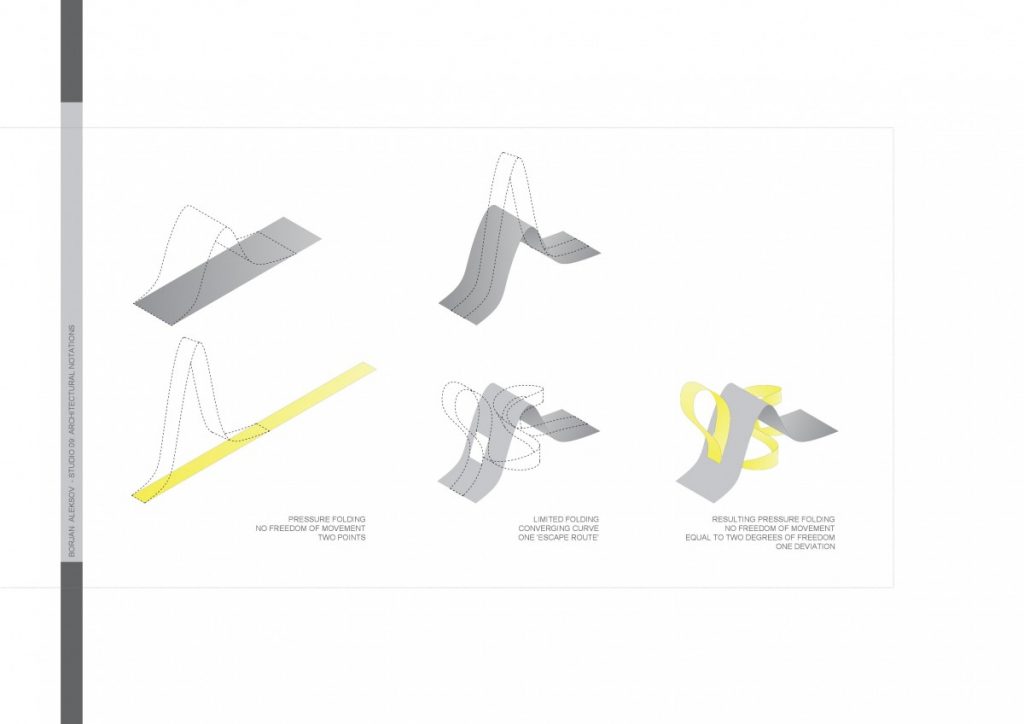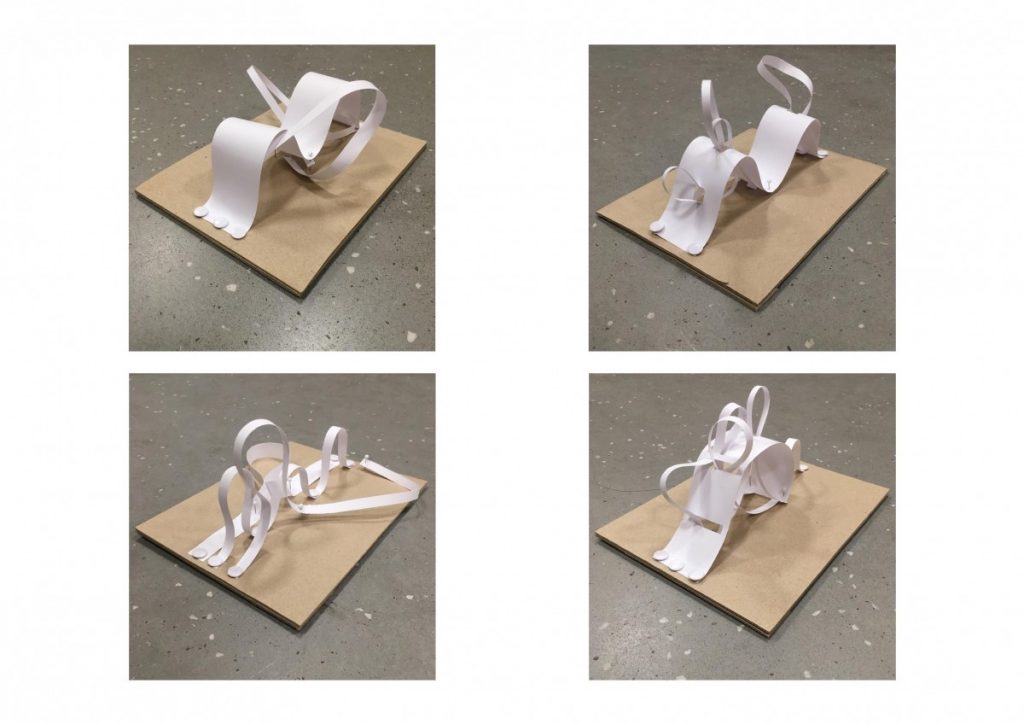
I have continued on exploring the limitations and restrictions of the rigid-foldable tubes. The constructed prototype models showed that the sine curve would induce movement in two directions during contraction. In order to solve the problem within the limits of rationality, a decision was made to simplify into a curve, which implies movement in one direction. Additionally, I explored the positioning of the tubes and concluded that it is better to substitute the continuous repetition with dynamic shape-changing tubes as the slope descends. This gives a steeper curve that is smooth on the inside with increased structural integrity.

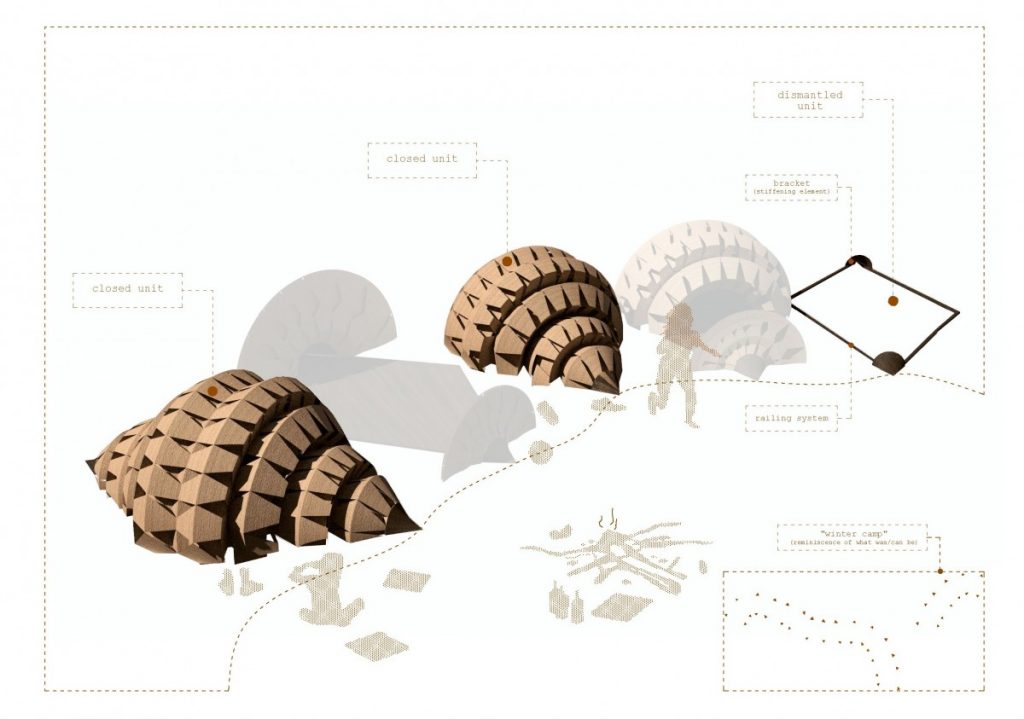
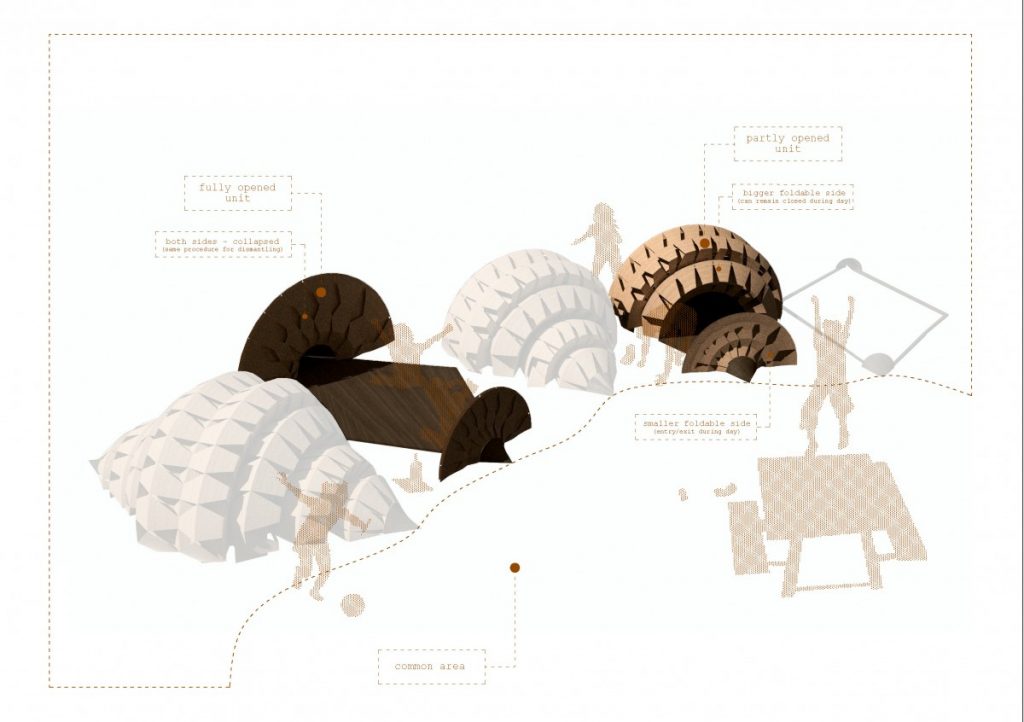
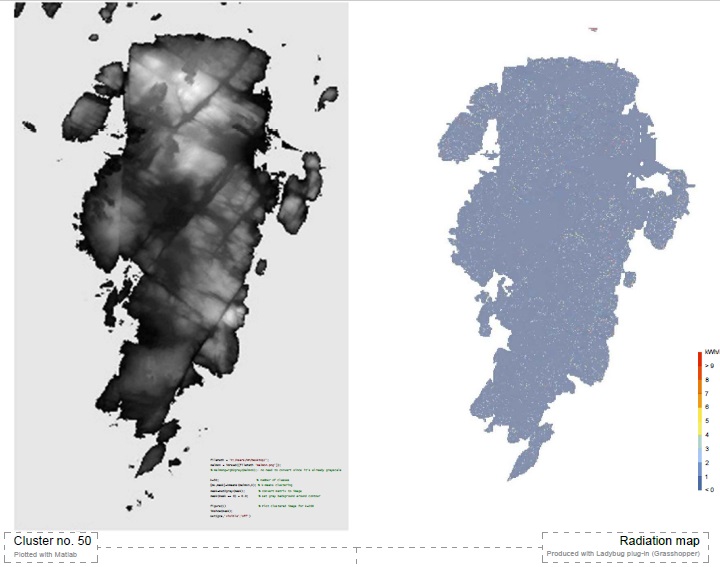
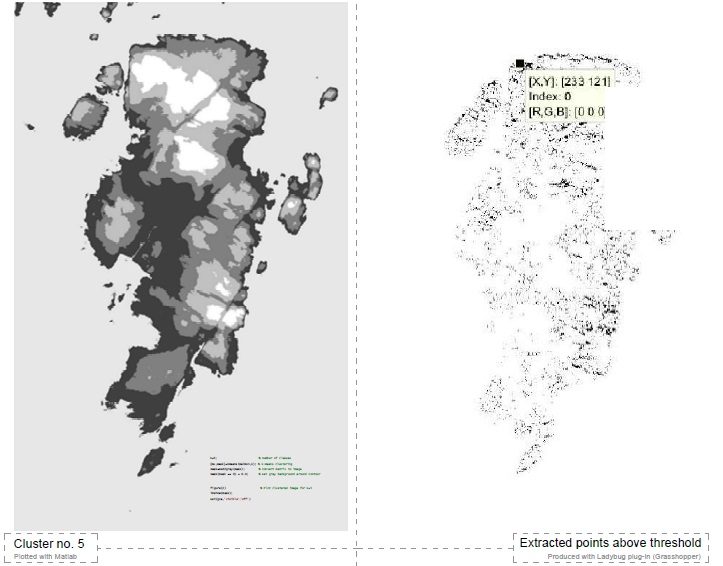
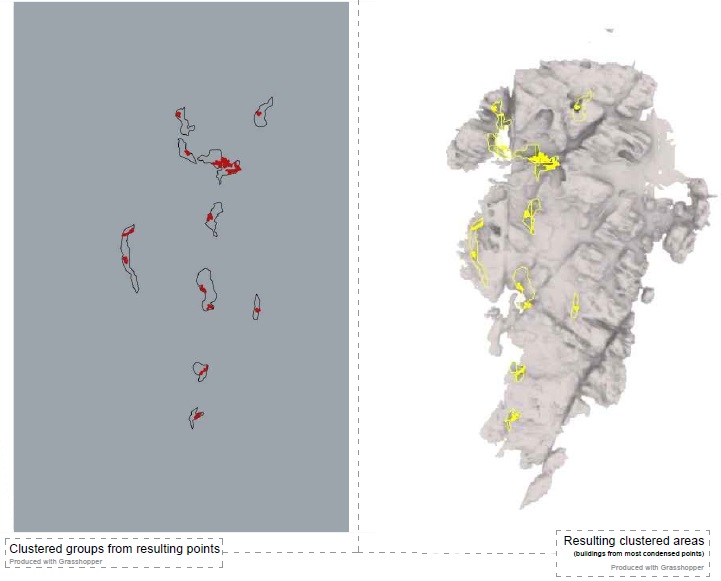
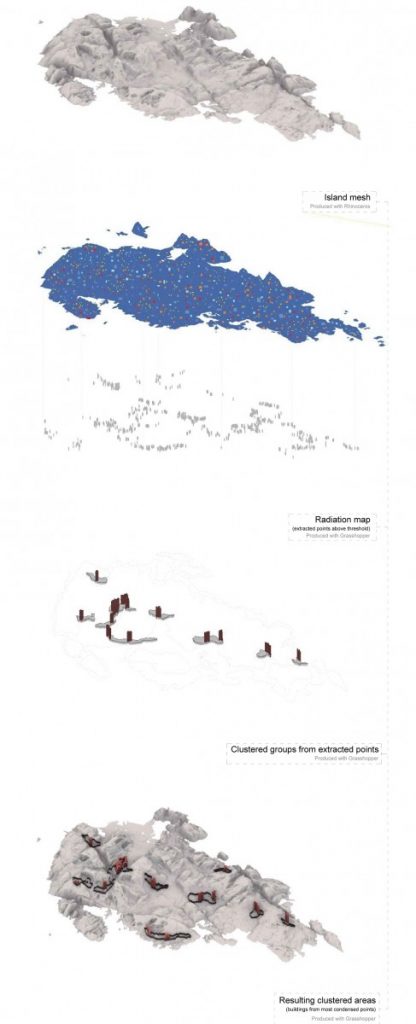
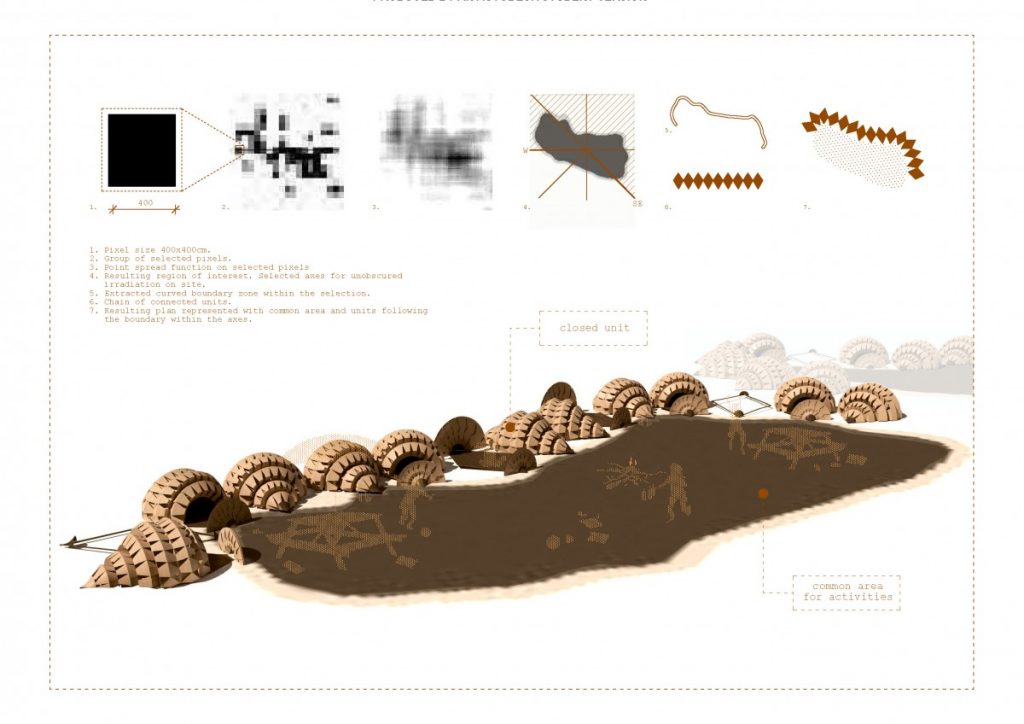
The units are positioned in a continuous chain around the defined areas, within limiting boundaries defined by the insolation conditions. The proposal demonstrates the foldability (contraction) of the shelters and their potential dismantling during winter.
During the final presentation, an observation was made that the shelters could remain attached during winter. Their structure would allow snow to fill the gaps (thermal bridges) and provide isolated volumes, which is favorable for winter conditions.