Decided to put this on YouTube (and here) for posterity. More detailed description of the agents’ behaviors is available in an older post.
Category: Inspiration
iii. recalibration…error!*2
The robot allows for direct feedback for the design strategy proposal. In oder to fully apply this method of working I formulated a strategy for the summer camp as an initial system of production, construction and form to allow for freedom in testing.
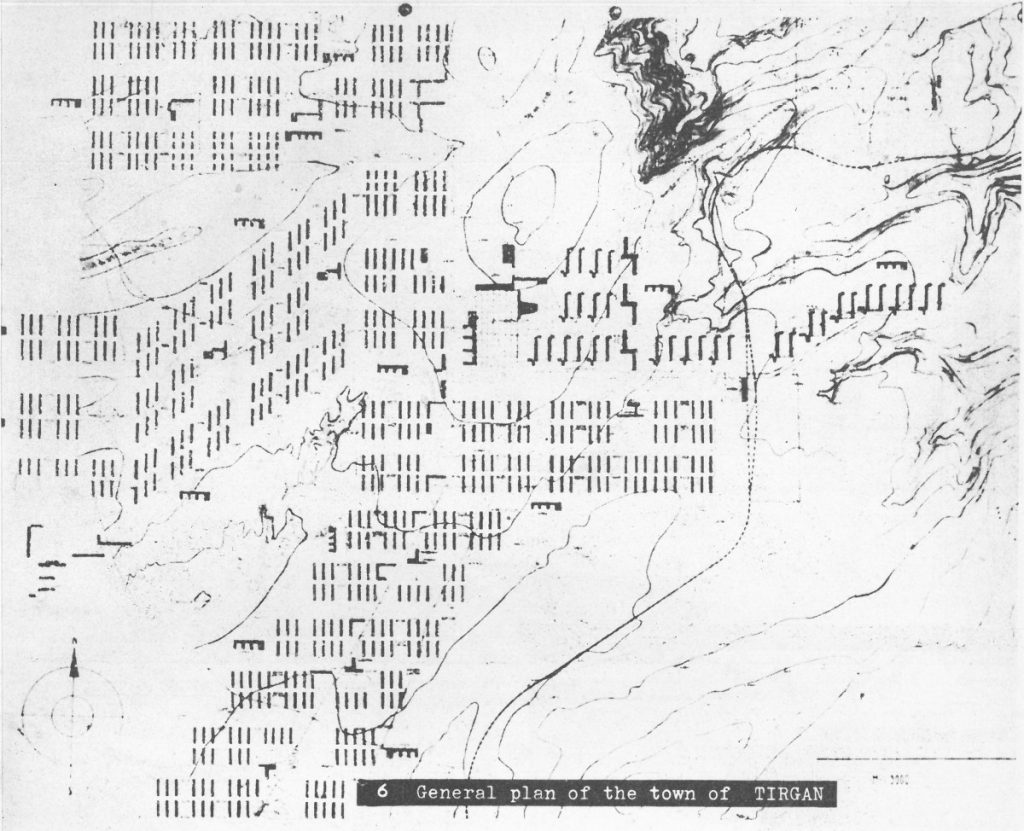
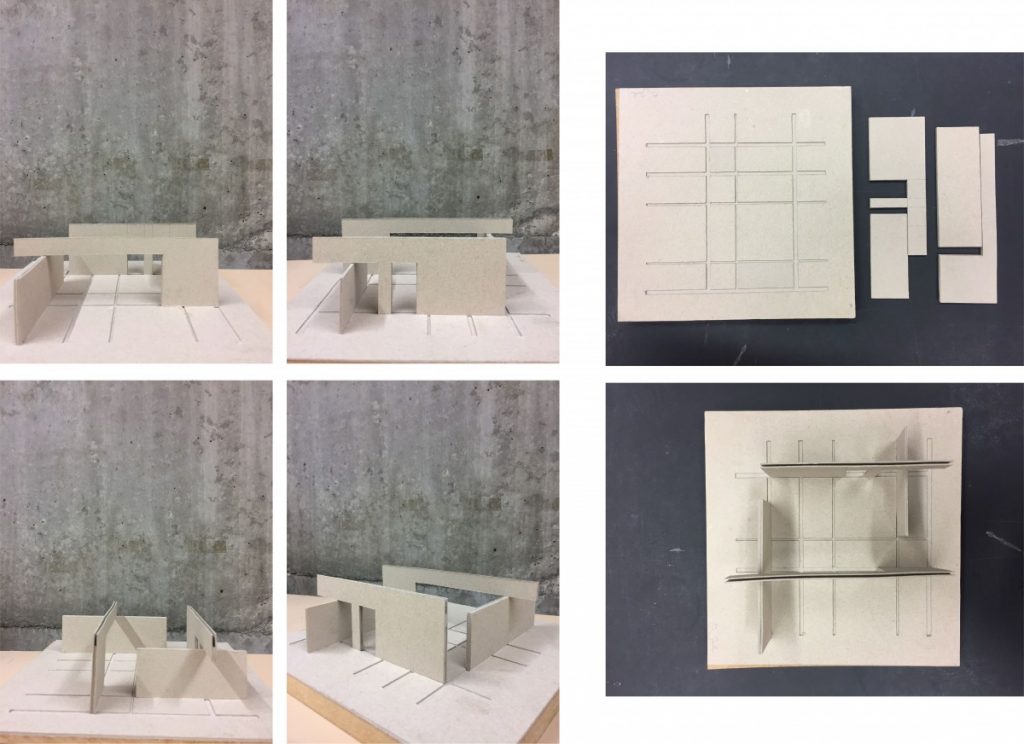
I took the soviet architectural town planning in 1930 by E. May as precedent. The linear markings on the site appears to respond to the context yet also offer an abstract notation of the program of development. The summer camp proposal for Malmon will be about setting up a grid that will be the groundwork for precast members that can easily be assembled and disassembled. Concepts of sustainability and impermanence are suggested.
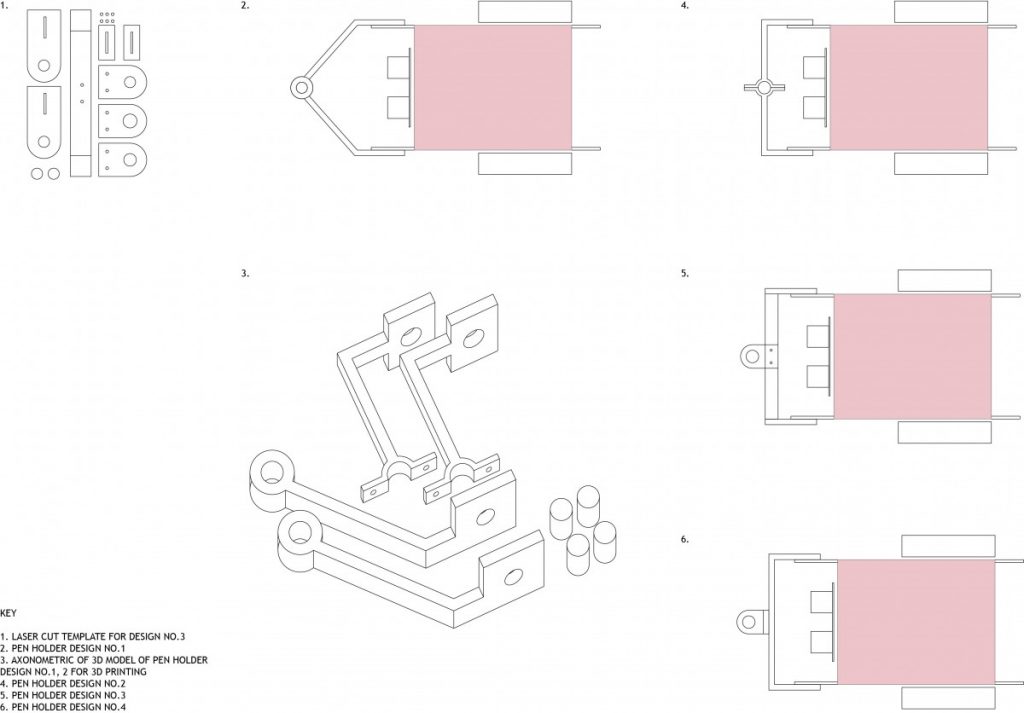
To obtain an output from the robot I 3D printed a set of arms/ pen holders to obtain a line drawing from the site analysis. While the robot scans the site, It would produce a line drawing as a data output. The implementation was dictated by the robots sensors, size and my coding capabilities. I did not achieve an outcome that could be presented or represented the idea. For the final task in this project I will work towards focusing on what data I want as an output and a much simpler application of the robots abilities.
ii. big data and nomadic robotics.
Studio 9_Project 3_Task 2: Occupations and Interventions.
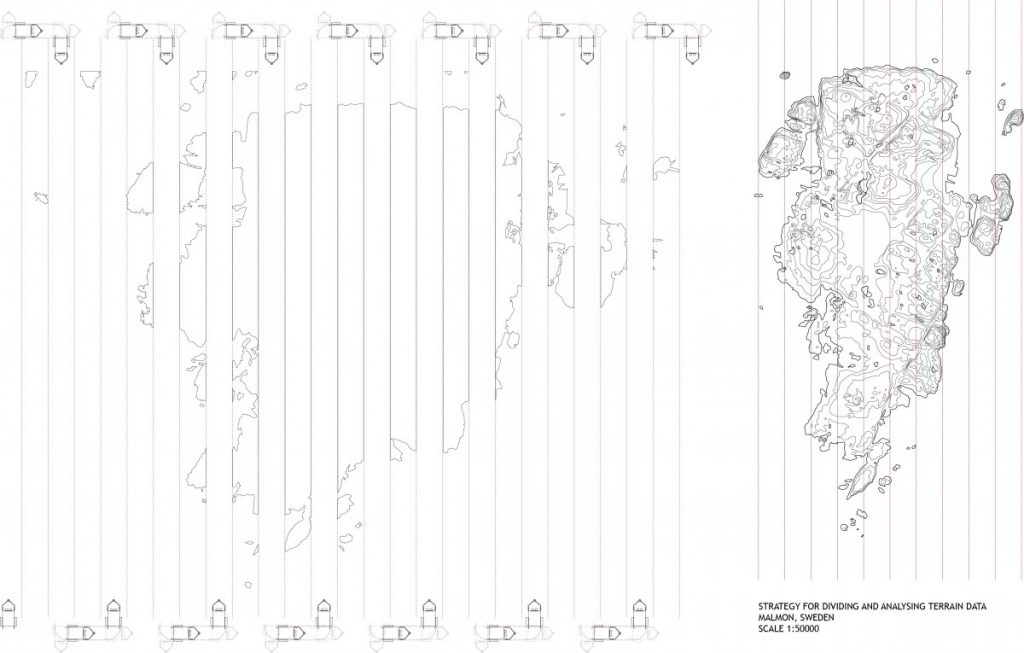
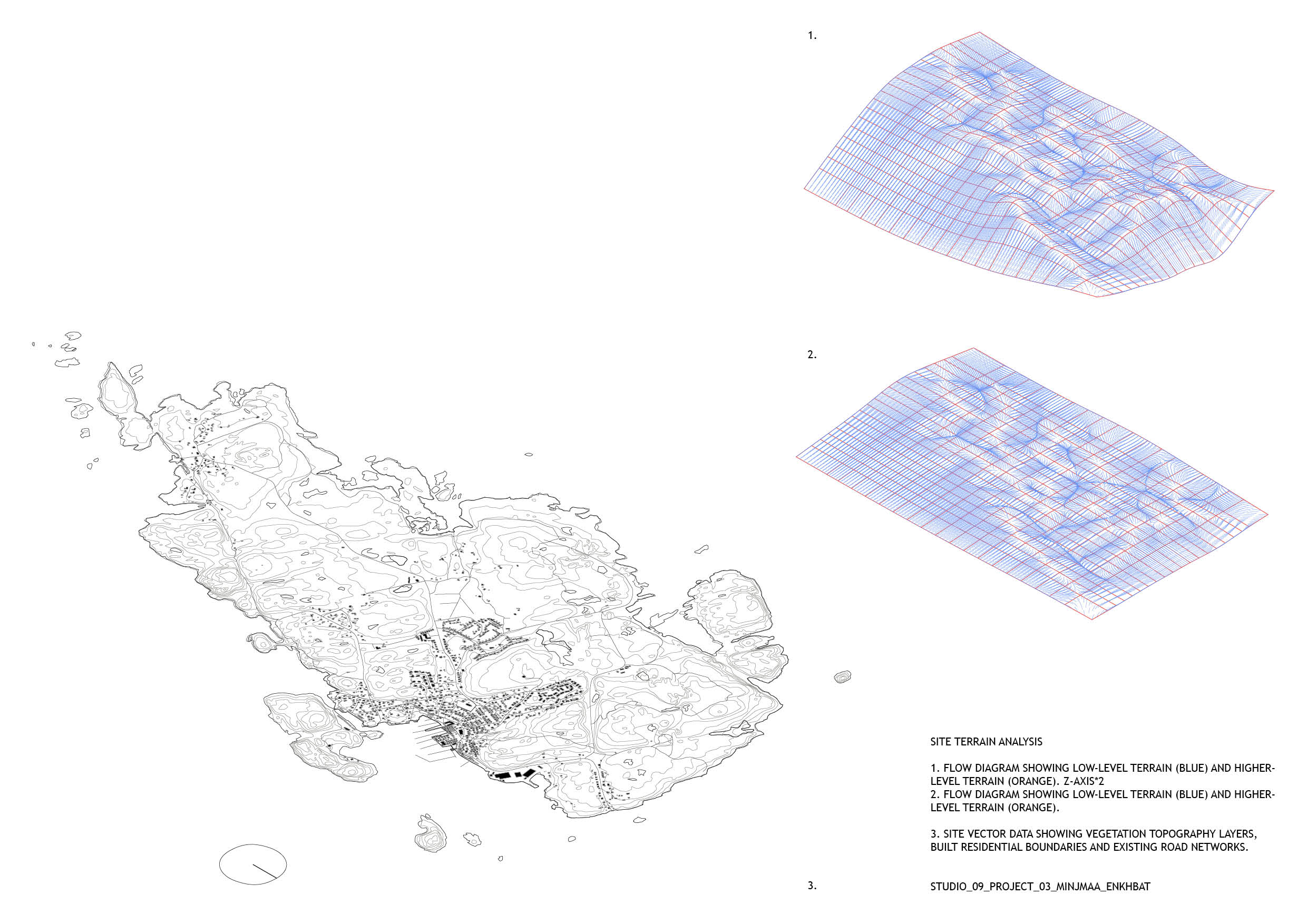
To occupy the site I began by collecting and analysing site data for Malmön. The program QGIS for editing and analysing geospatial information was used to extract the vector information; topography, population and marine geology. A colour png map provided the basis for extracting the 3D terrain data using a python script and into Rhino, with initial topography analysis through flow diagrams in grasshopper. A photographic study was also carried out and compiled into a booklet.
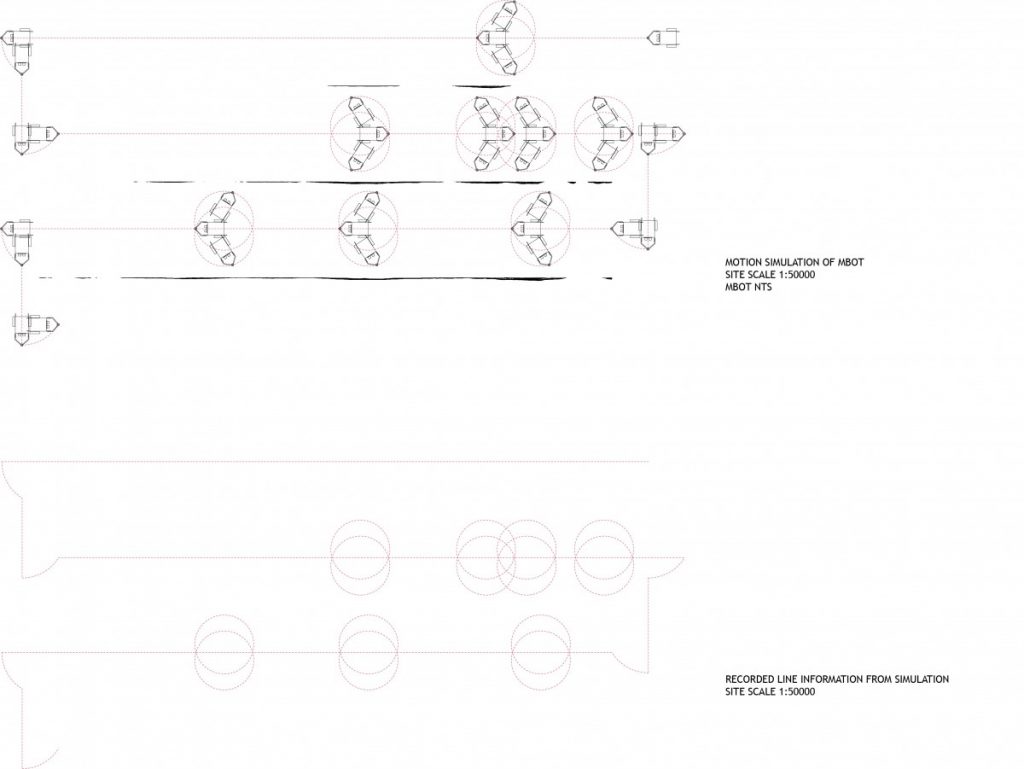
The intervention aspect was based heavily on ABM research – agent based models. An agent is aware of its surroundings and its abilities. When acting in a collective manner they exhibit swarm intelligence, the collective behaviour of decentralised self-organised systems. This means each member autonomously offers its abilities in order to study an overall system. The members, or agents, self-coordinates without a leader and cooperate in solidarity resulting in a self-healing system. This allows members to be added or removed dynamically as the agents will recalibrate in a constant feedback loop.
‘Boids’ by Craig Reynolds was the grounds for my research into swarms and flocking behaviours for computer simulations. His theory is a basic flocking model consisting of three steering behaviours; separation, alignment and cohesion. Ant colonies that organise using pheromone and visibility factors were also part of the initial studies.
I would like to base project 3 on the collection of site data using agents and subsequently allowing the agents to alter the collected data in order to intervene and implement the summer camp design on Malmön. To engage with this theory in the material dimension, I decided give form to the agent as a mini Arduino robot name Mö. This allows for real-time feedback with the tests I run for the agent simulation on site. Giving robotics agent behaviours has its own research and theory basis. Although Craig Reynolds theory of Boids is a great foundation, I also studied vehicle behaviour and coding in ‘Vehicles: Experiments in Synthetic Psychology’ by Valentino Braitenberg. Processing and Arduino will be the main programming softwares, with C and Java as scripting languages. The Nature of Code on youtube and Github, as well as Studio 09’s own processing tutorials have been great learning platforms for this.

i. research.
Studio 9_Project 3_Task 1 : Human reading.
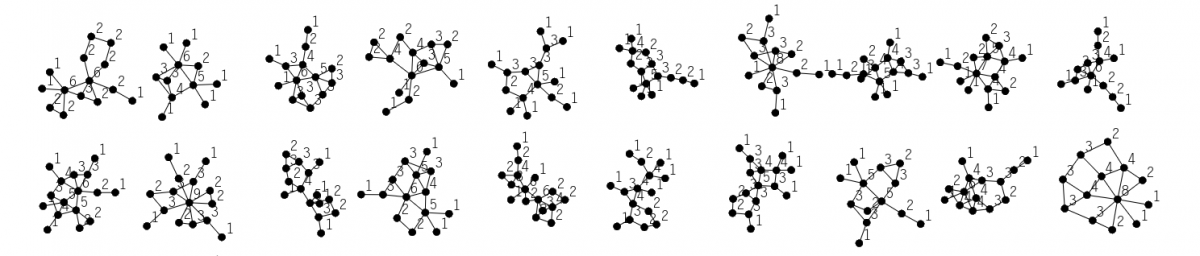
The 9 projects below were collected as precedents for project 3.
These plans and sections are a representation of two strings of thought; i. an exploration of form and approaches to setting; ii. city making and sequential building. The first set of projects play with ideas of control, vistas and the act of an icon in the landscape. They tackle form and building materials in an experimental manner using the environment and new technology as key tools. A simple question of building up or down and along the terrain is also brought to question. The second string of thought is concerned with city making and sequential building with studies of the layout of the city of Pompeii, the Acropolis of Athens and futuristic plug-in cities.
For all the space frame lovers out there
Studio 09 Pinterest board
Pablo and I have started a Studio 09 Pinterest board, and will be adding inspiration weekly based on relevant discussions in our tutorials. Feel free to contribute with your pins as well!
Metal folding
Low fidelity by Erin Besler.
An interesting project by Erin Besler dealing with representation and fabrication (and Peter Eisenman). The robotic fabrication equivalent to sampling a song?
http://www.erinbesler.com/low-fidelity/
Origami algorithm
MIT’s ultimate origami algorithm is unlocking the potential of 3D printers
https://3dprintingindustry.com/news/mits-ultimate-origami-algorithm-unlocking-potential-3d-printers-117105/
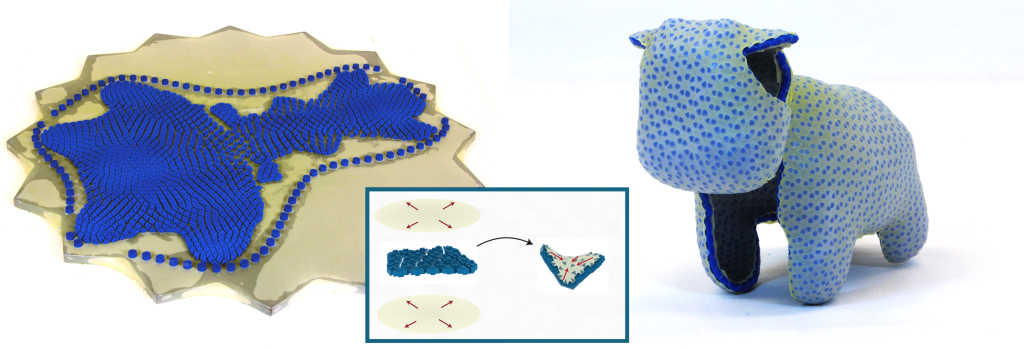
Demonstration of IST Austria’s CurveUP technology, turning a 2D shape into a 3D model. Image via: Guseinov, Miguel and Bickel. Picture from https://3dprintingindustry.com/news/mits-ultimate-origami-algorithm-unlocking-potential-3d-printers-117105/
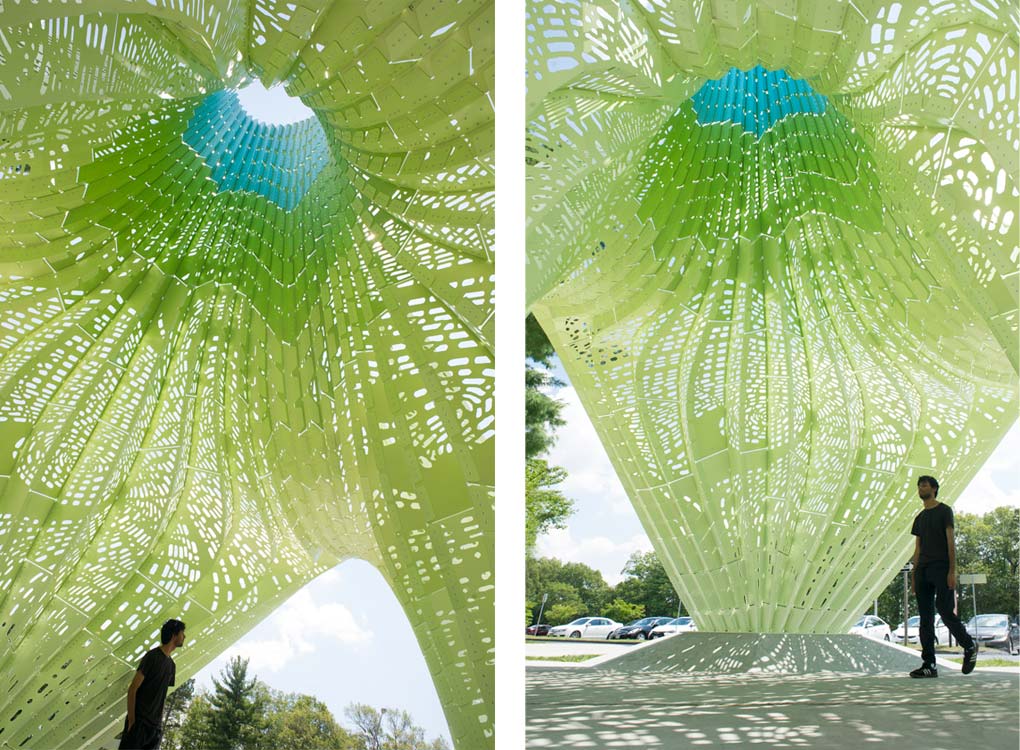
Marc Fornes
MARC FORNES / THEVERYMANY
Entrance to Rhode Island College’s Fine Arts Center