As we moved onto task 2, I started analysing forms of the linkages and combining two sets to test the spatial properties they exhibited.
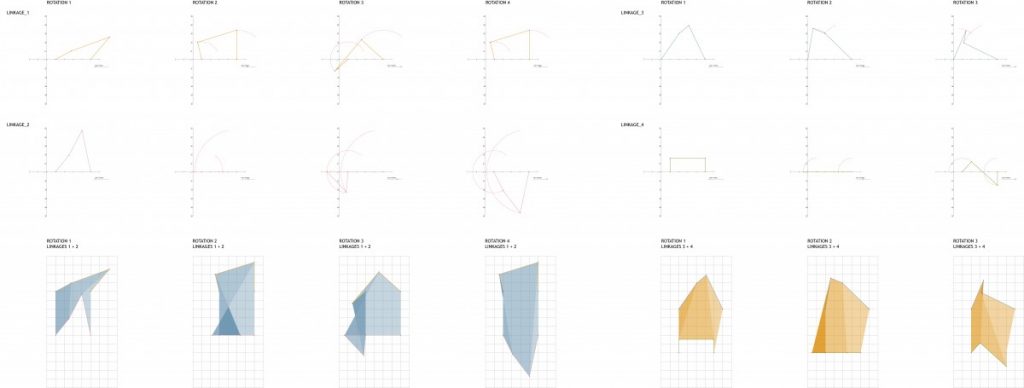
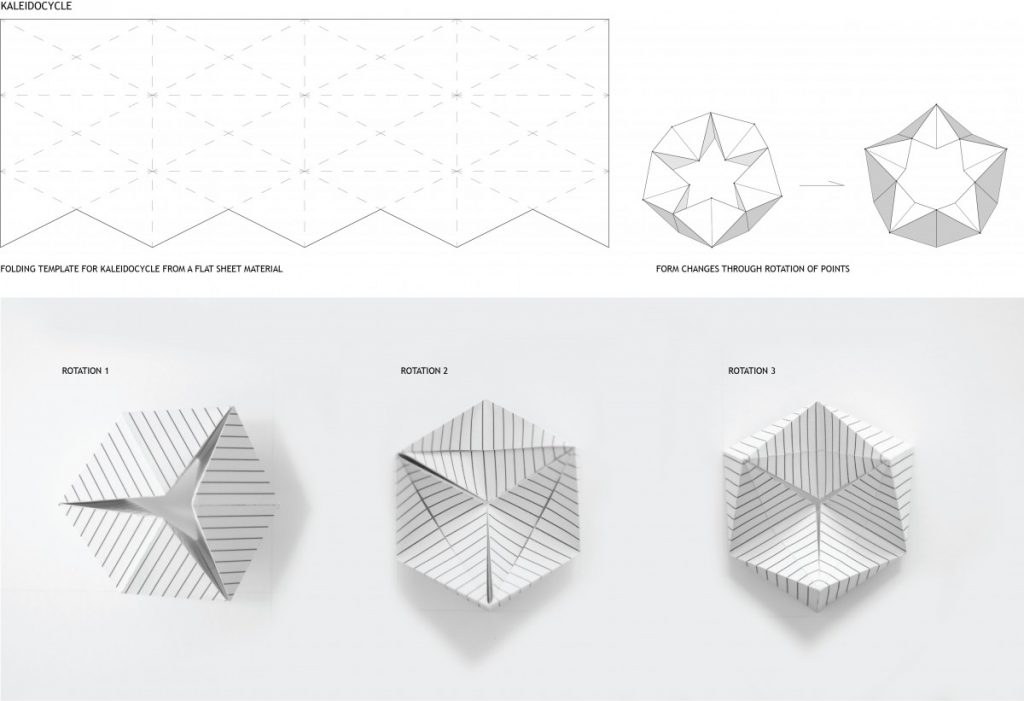
The rotation of the linkages needed to exhibit some form or motion and resulting change that would offer a variation in form and surface and space, as in the previous study of the kaleidocycle.
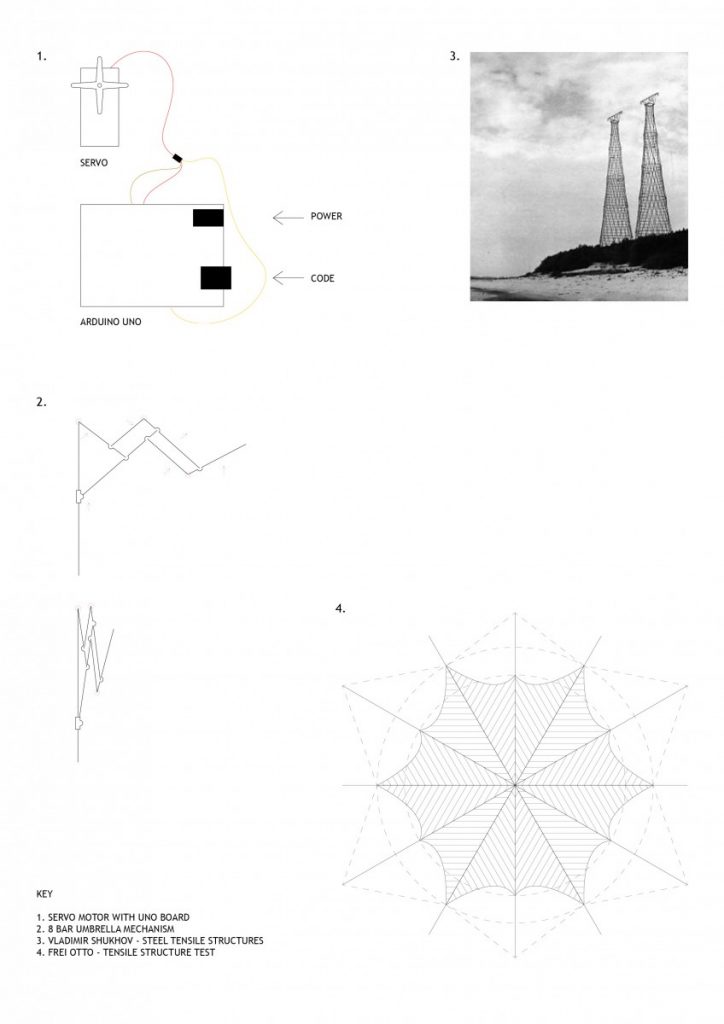
The servo was mounted to a clear acrylic frame and I began to run tests of forms using the basic principle of the four bar linkage.
As observed from the tests above, the spatial study extended only to planar elements. I began incorporating rotation and folds to allow for movement in 3 dimensions and multiple axis for each linkage. Both sets of studies provide grounds for further exploration but I will need to be more intentional in the variation of parameters of the subject.