Studio 9_Project 3_Task 2: Occupations and Interventions.
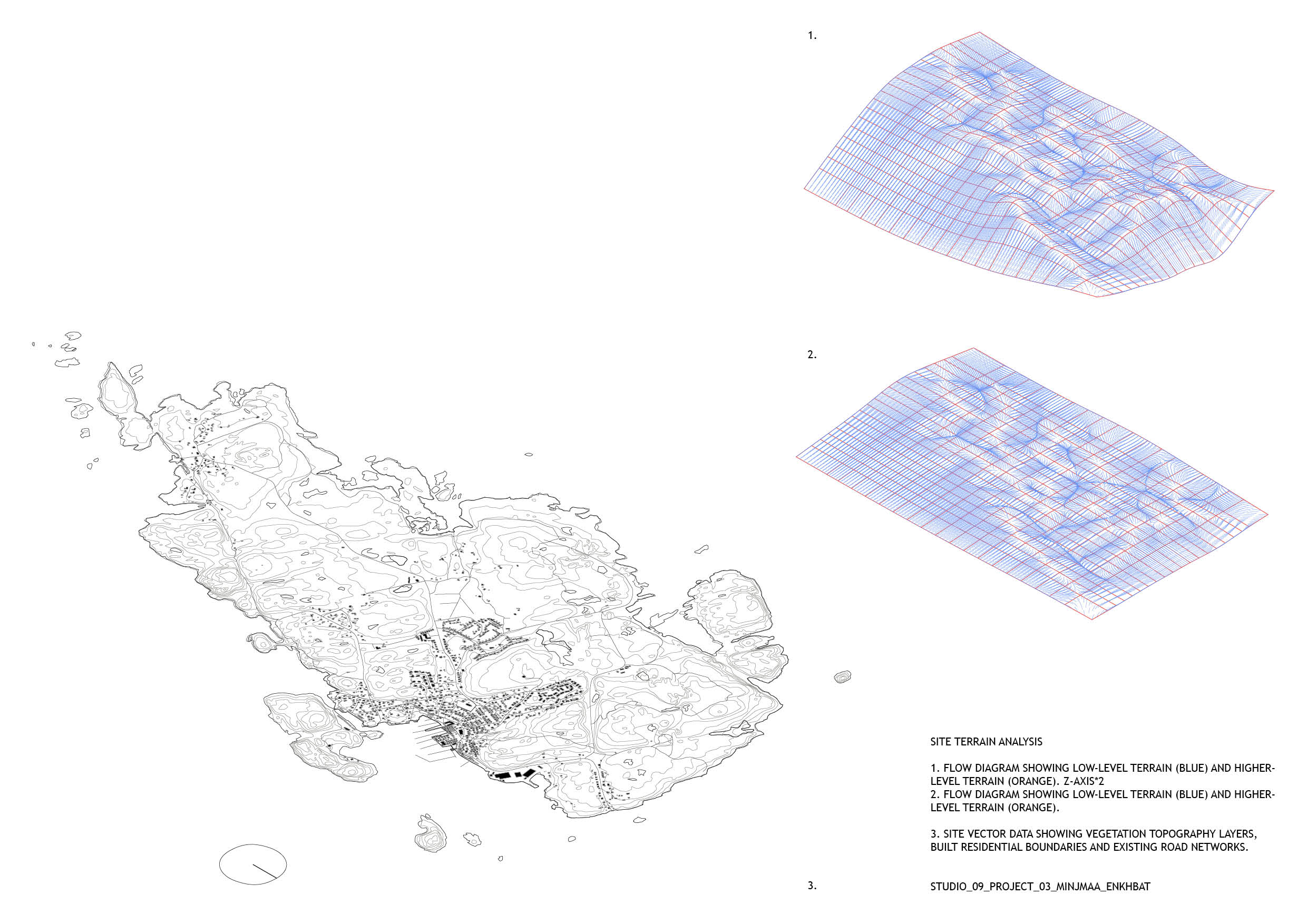
To occupy the site I began by collecting and analysing site data for Malmön. The program QGIS for editing and analysing geospatial information was used to extract the vector information; topography, population and marine geology. A colour png map provided the basis for extracting the 3D terrain data using a python script and into Rhino, with initial topography analysis through flow diagrams in grasshopper. A photographic study was also carried out and compiled into a booklet.
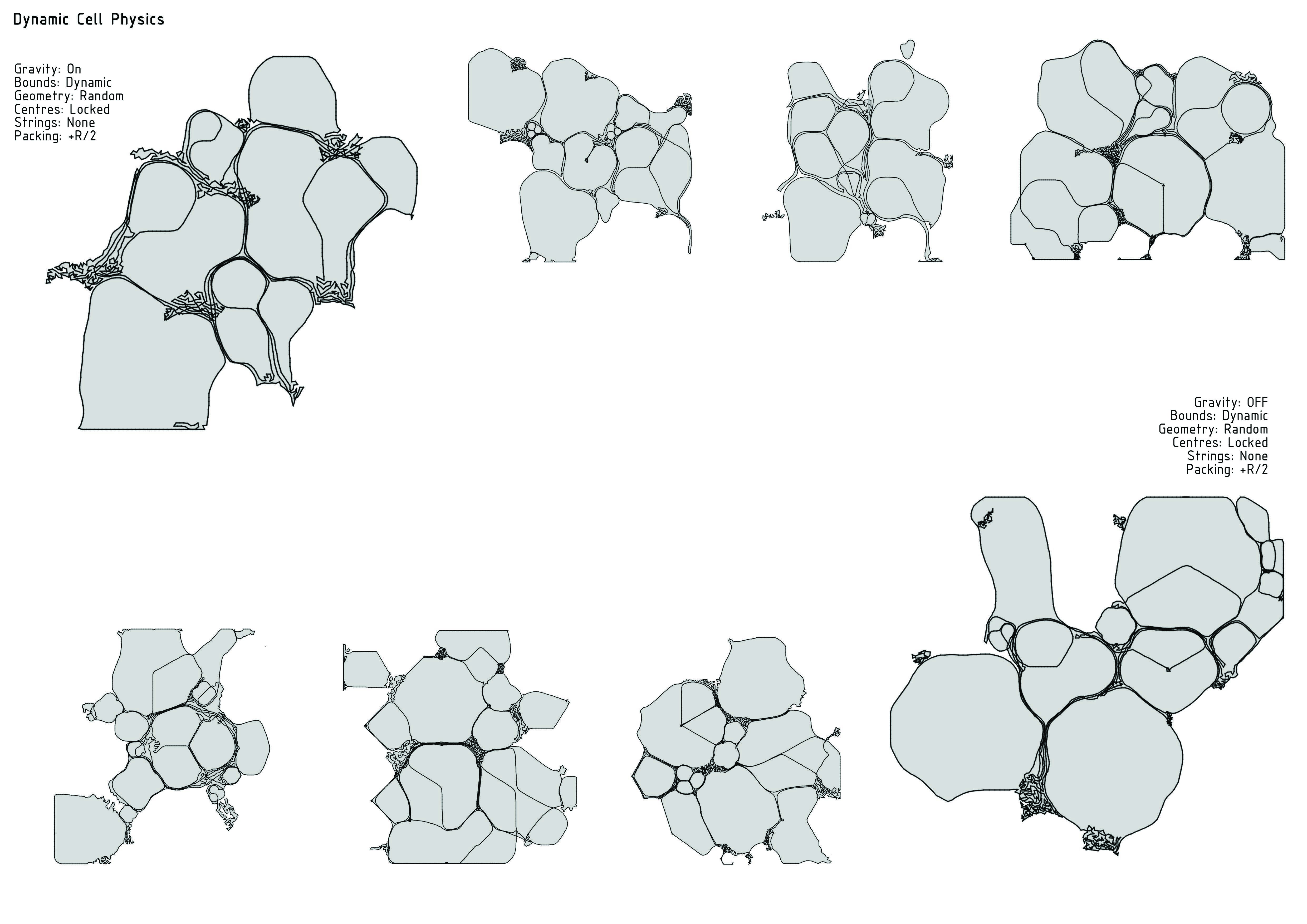
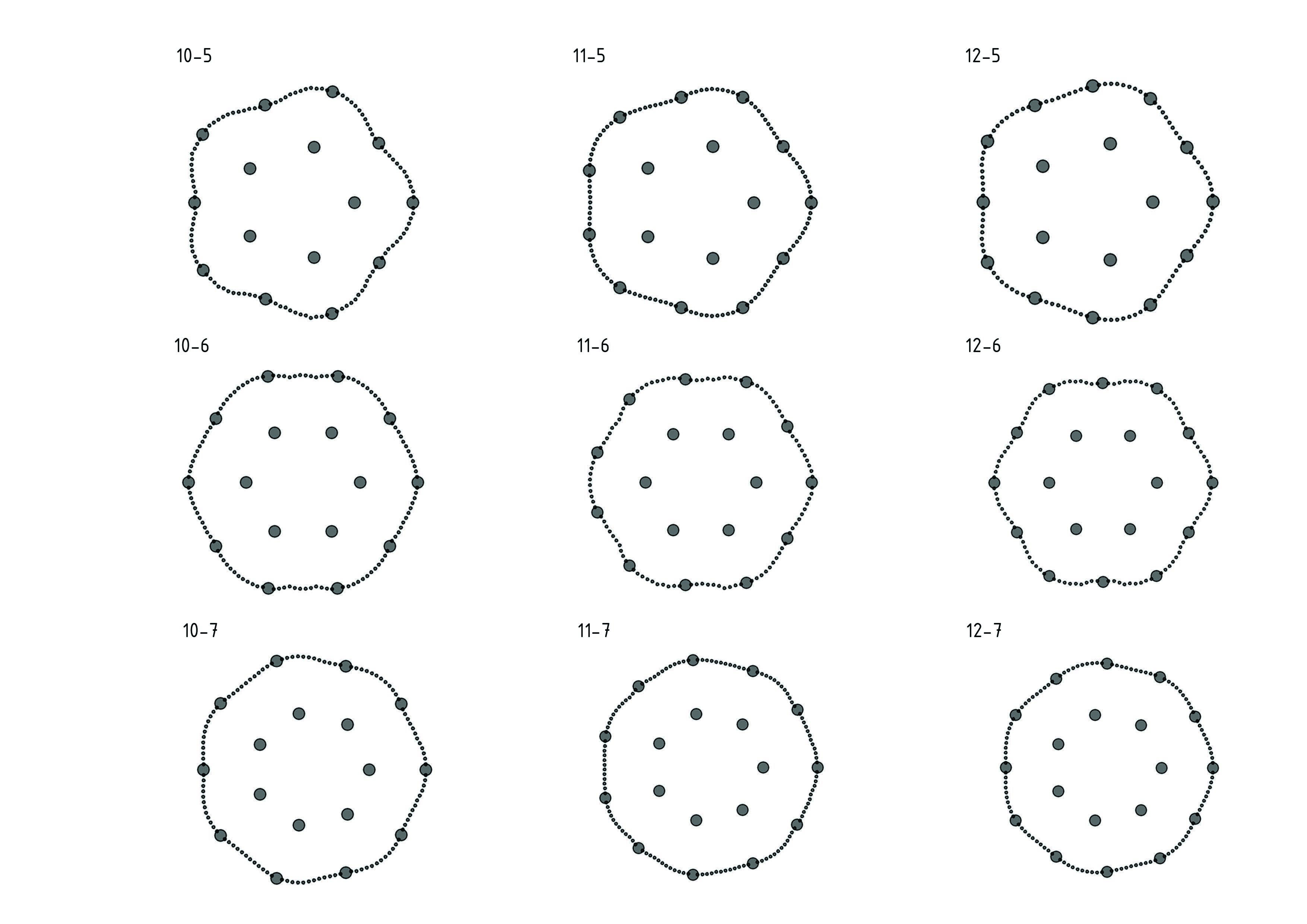
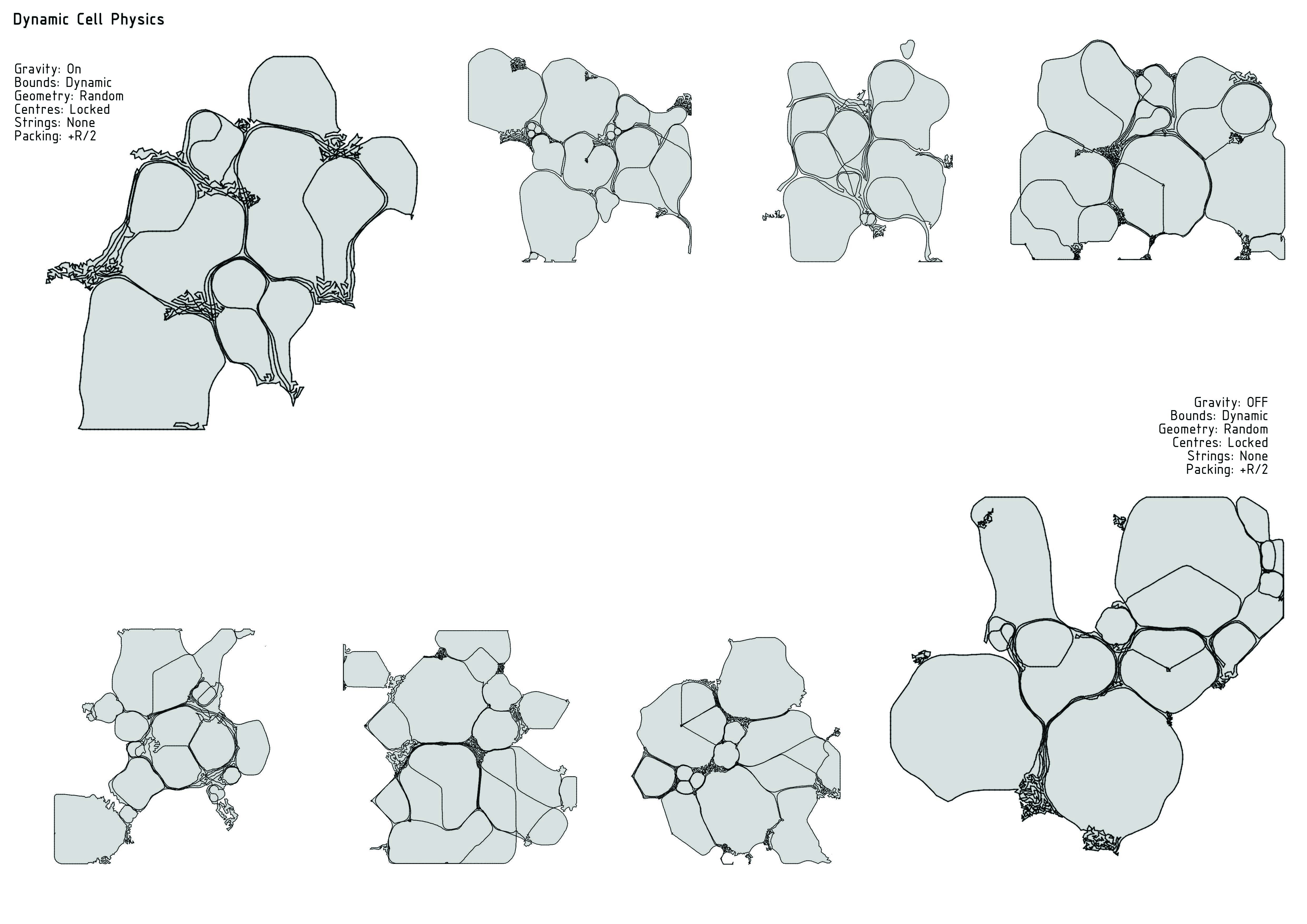
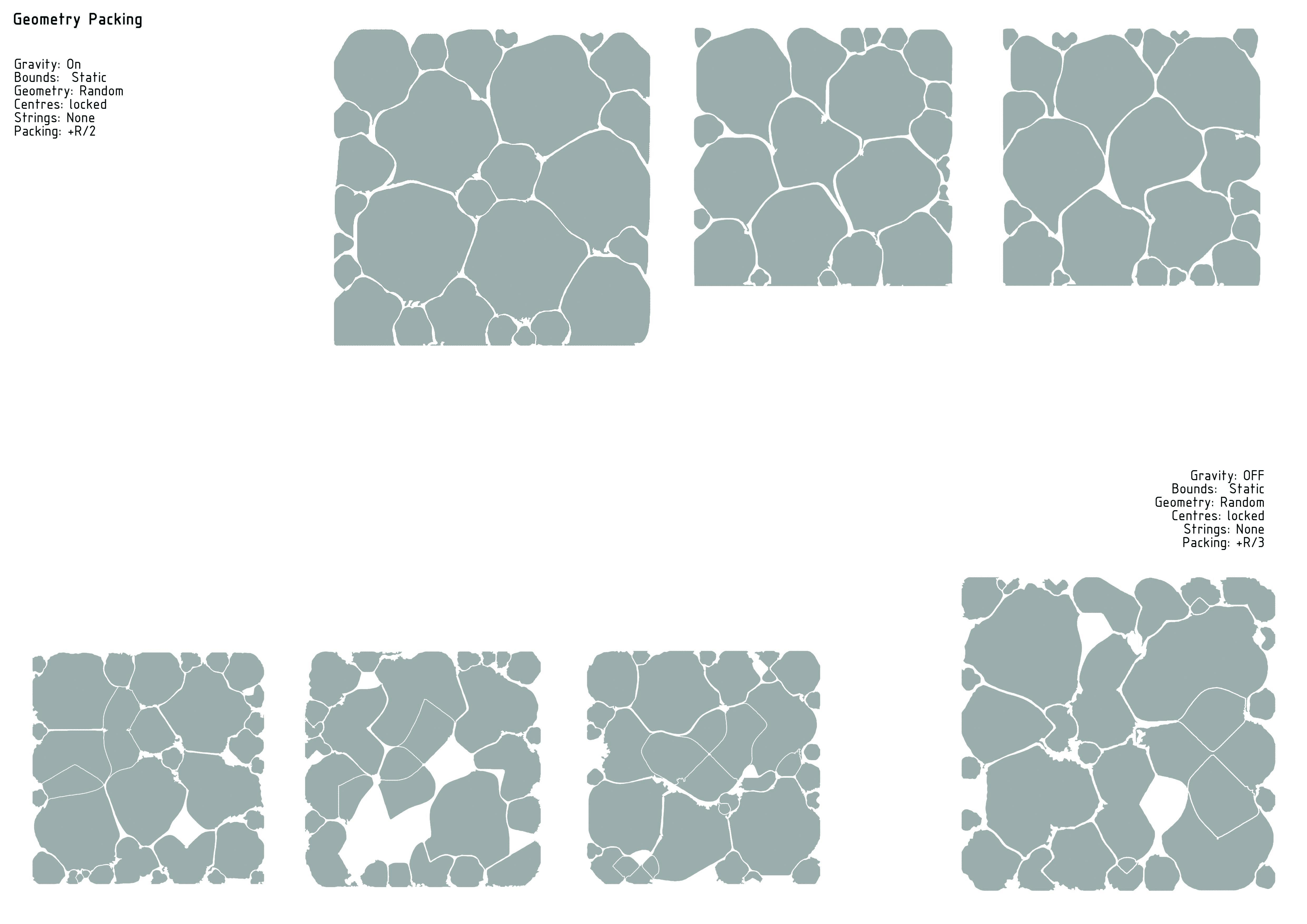
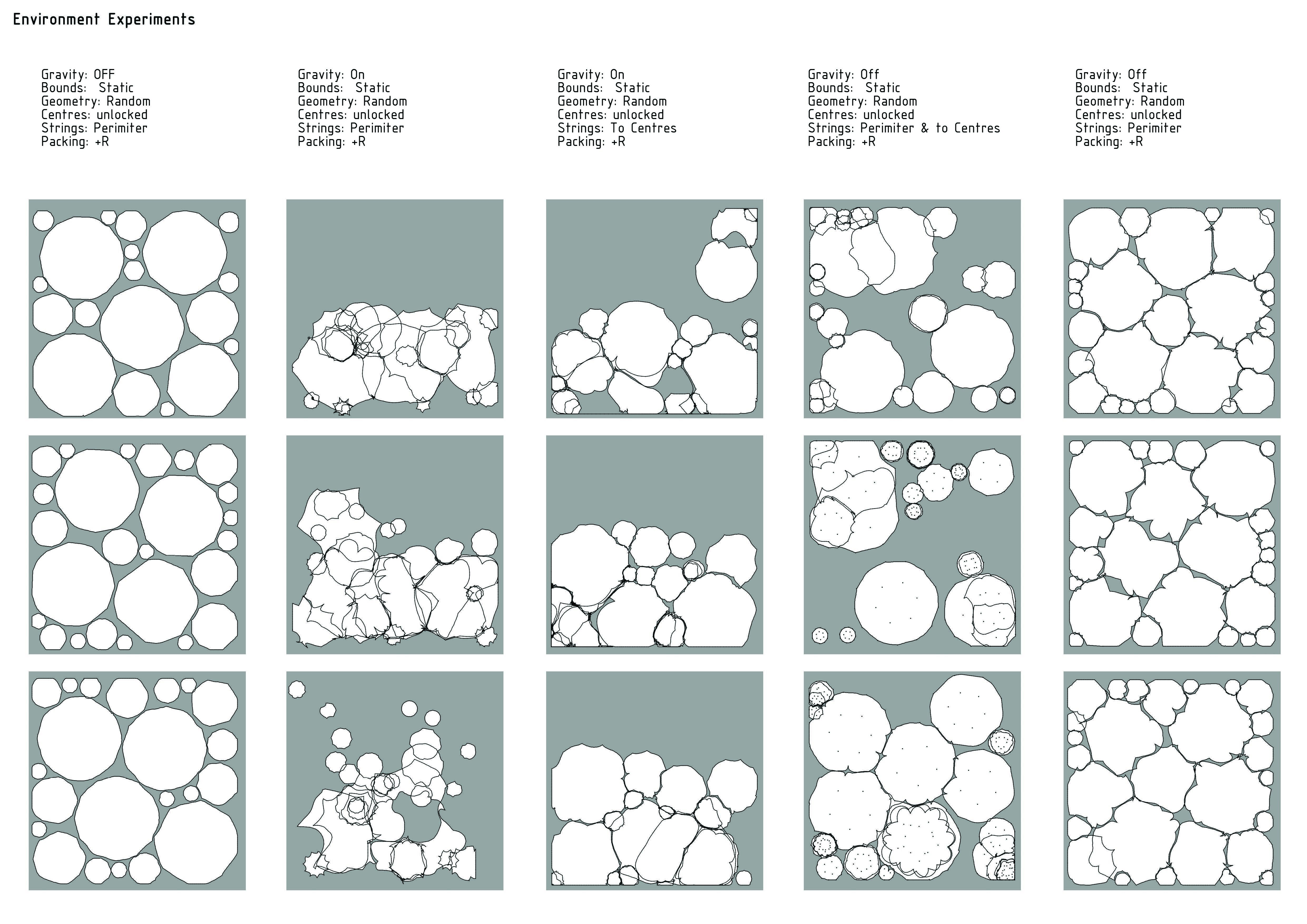
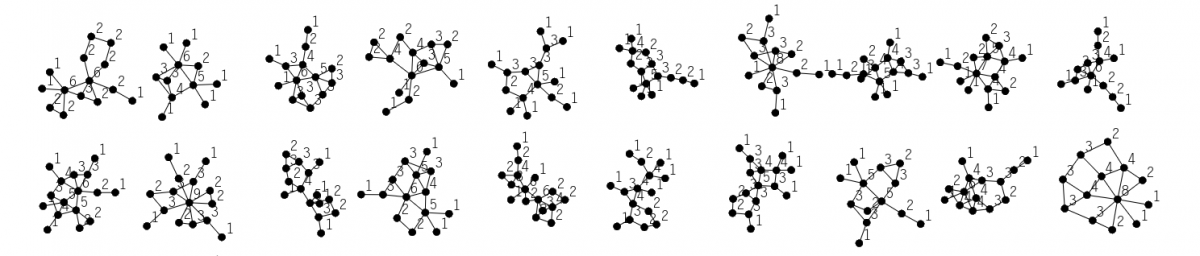
The intervention aspect was based heavily on ABM research – agent based models. An agent is aware of its surroundings and its abilities. When acting in a collective manner they exhibit swarm intelligence, the collective behaviour of decentralised self-organised systems. This means each member autonomously offers its abilities in order to study an overall system. The members, or agents, self-coordinates without a leader and cooperate in solidarity resulting in a self-healing system. This allows members to be added or removed dynamically as the agents will recalibrate in a constant feedback loop.
‘Boids’ by Craig Reynolds was the grounds for my research into swarms and flocking behaviours for computer simulations. His theory is a basic flocking model consisting of three steering behaviours; separation, alignment and cohesion. Ant colonies that organise using pheromone and visibility factors were also part of the initial studies.
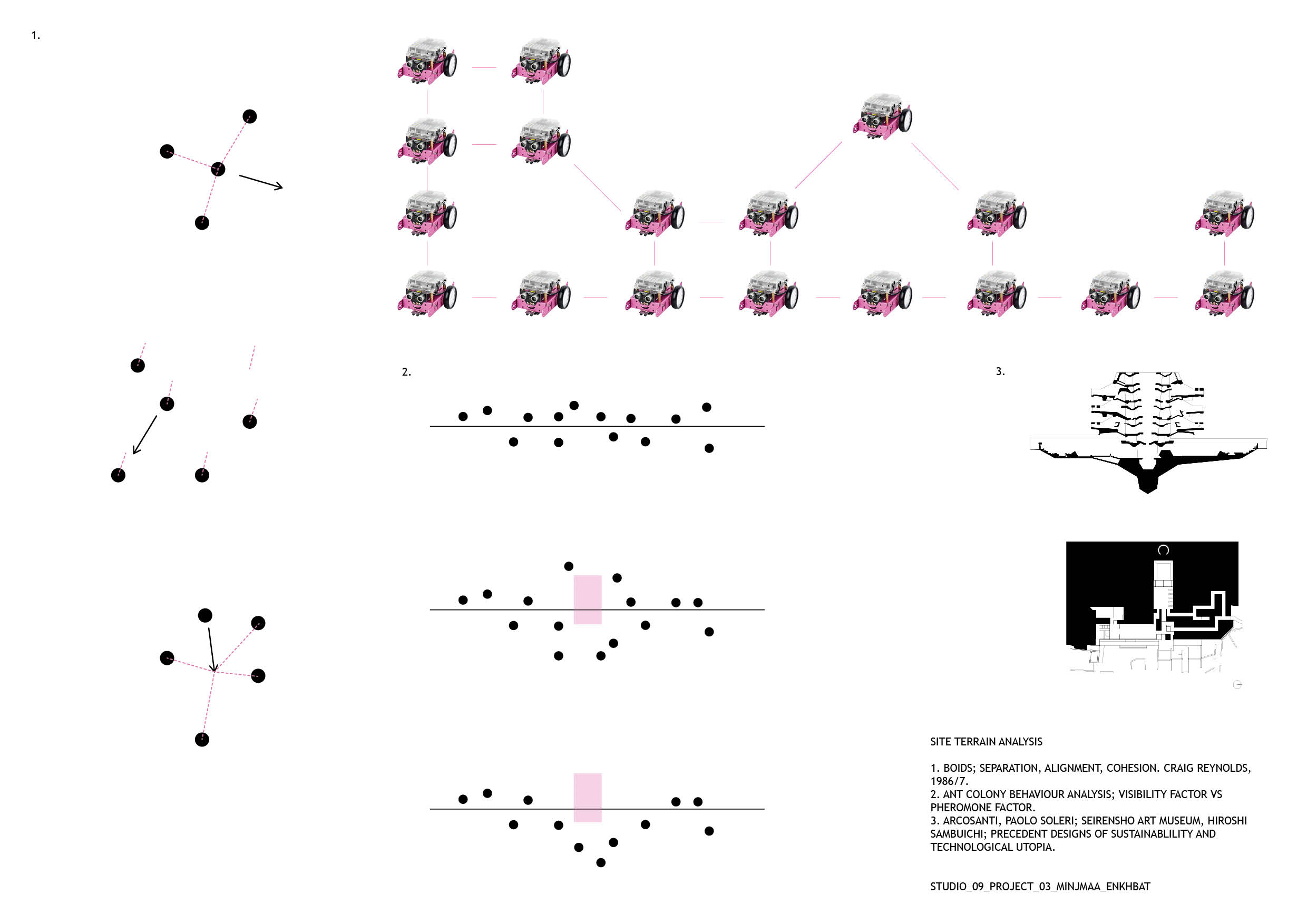
I would like to base project 3 on the collection of site data using agents and subsequently allowing the agents to alter the collected data in order to intervene and implement the summer camp design on Malmön. To engage with this theory in the material dimension, I decided give form to the agent as a mini Arduino robot name Mö. This allows for real-time feedback with the tests I run for the agent simulation on site. Giving robotics agent behaviours has its own research and theory basis. Although Craig Reynolds theory of Boids is a great foundation, I also studied vehicle behaviour and coding in ‘Vehicles: Experiments in Synthetic Psychology’ by Valentino Braitenberg. Processing and Arduino will be the main programming softwares, with C and Java as scripting languages. The Nature of Code on youtube and Github, as well as Studio 09’s own processing tutorials have been great learning platforms for this.