In the previous exploration we observed the spatial and form giving possibilities of the four bar linkage when combined with the servo motor.
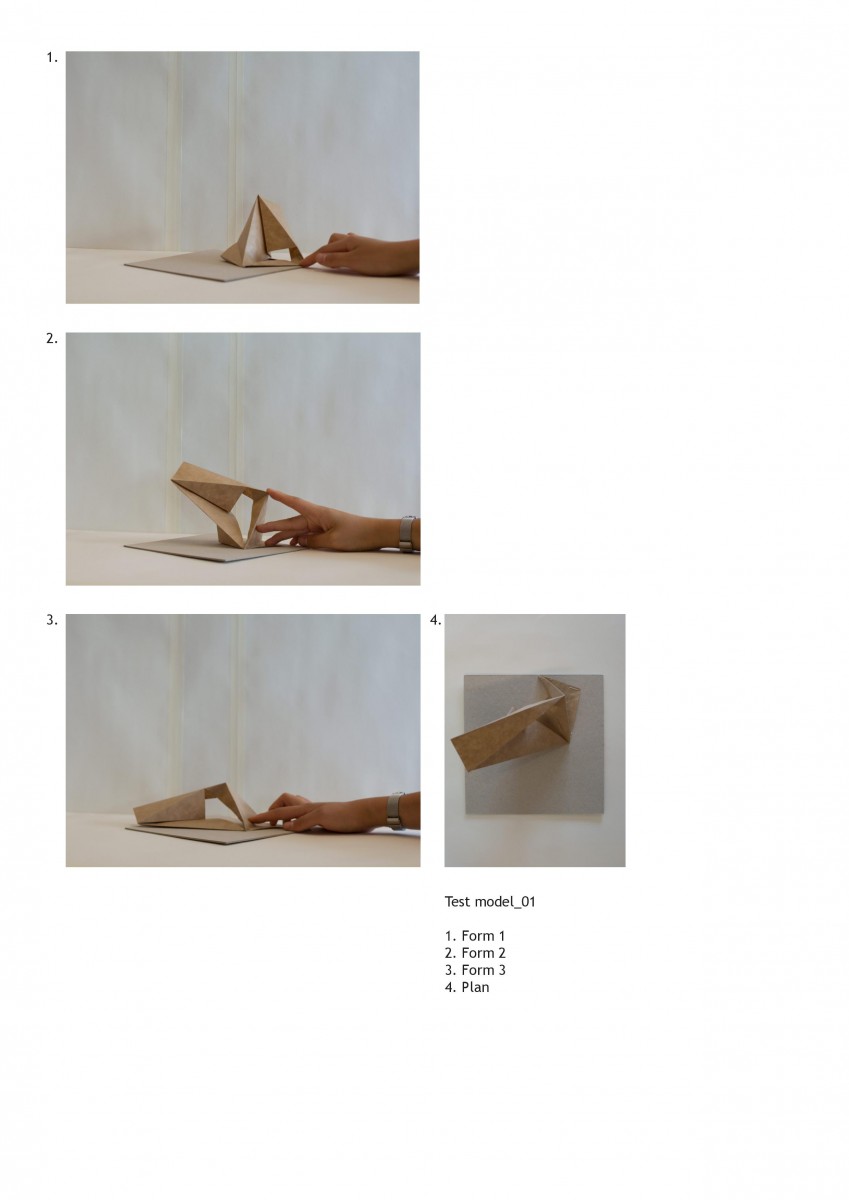
The first test was a planar study of space and allows a reading in plan and in section along a flat plane. When we bring in ideas of tectonics and thickness, we can easily extrude up and allow our architectural judgement to build on from this point.
The second test was a study in multiple dimensions and axis. Attempting to assign material qualities was a challenge and therefore this direction seemed like a viable path to further explore.
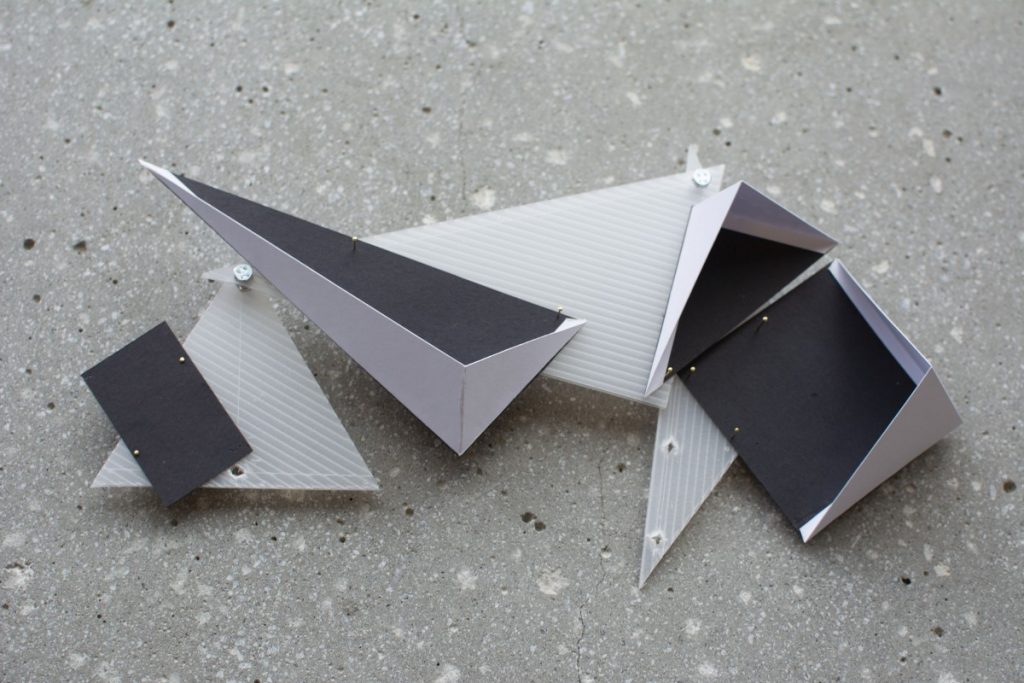
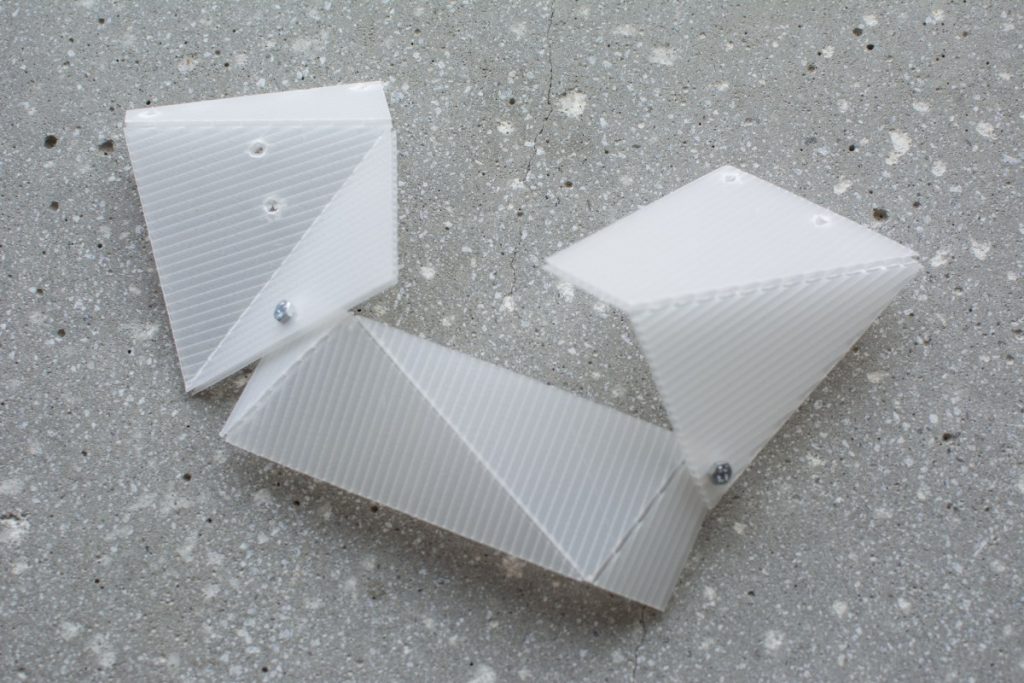
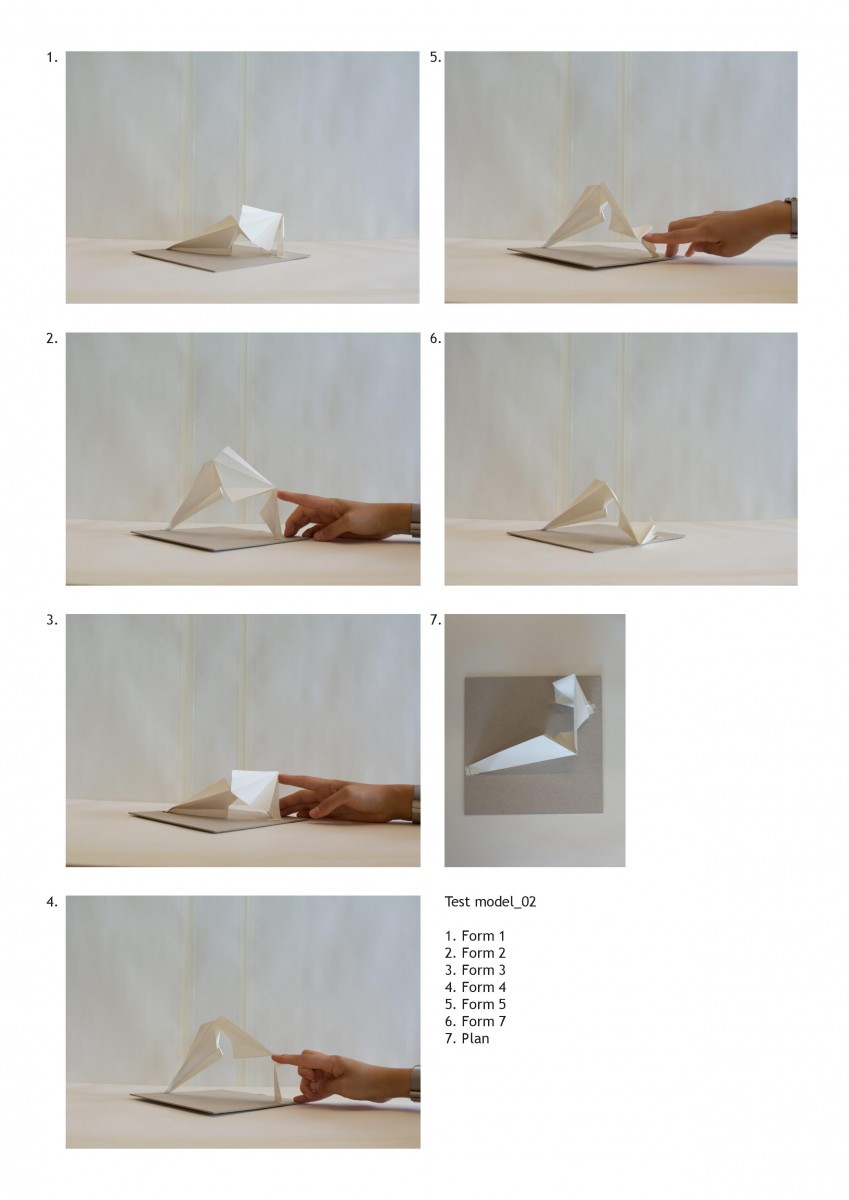
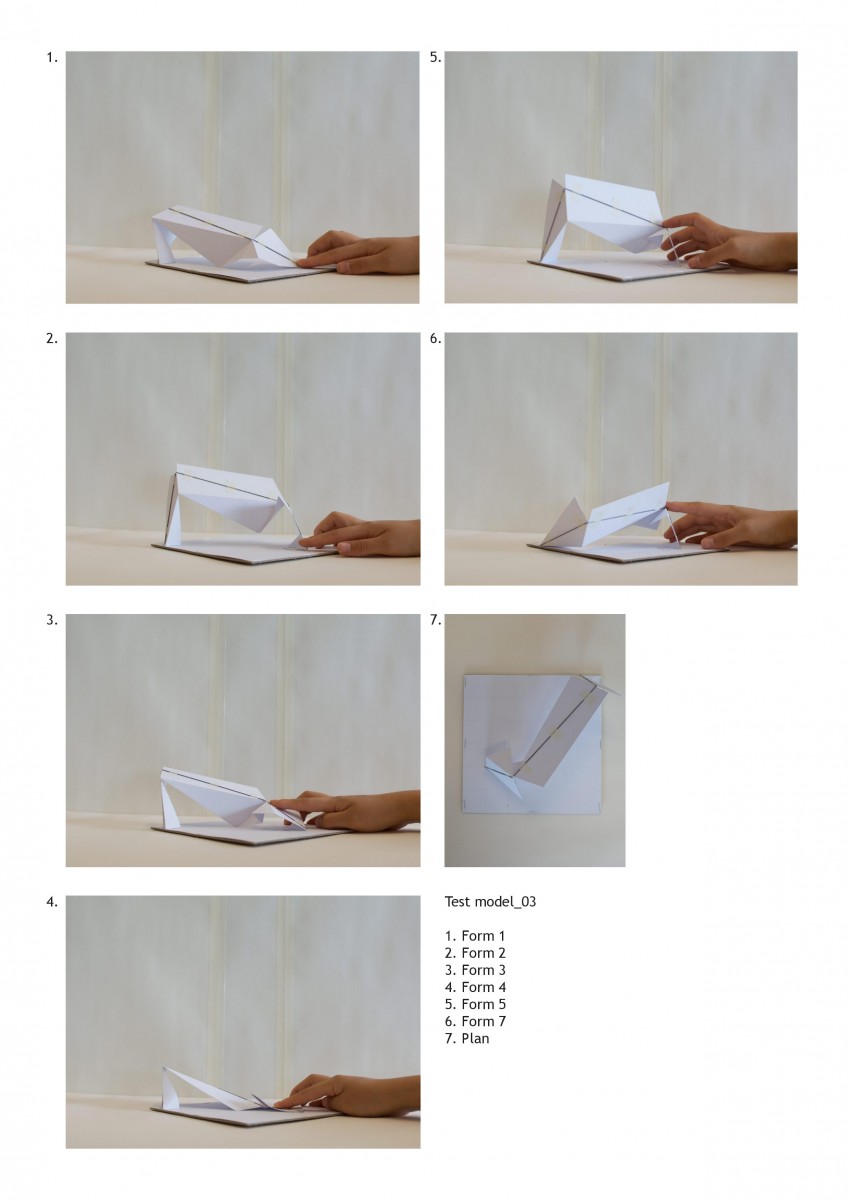
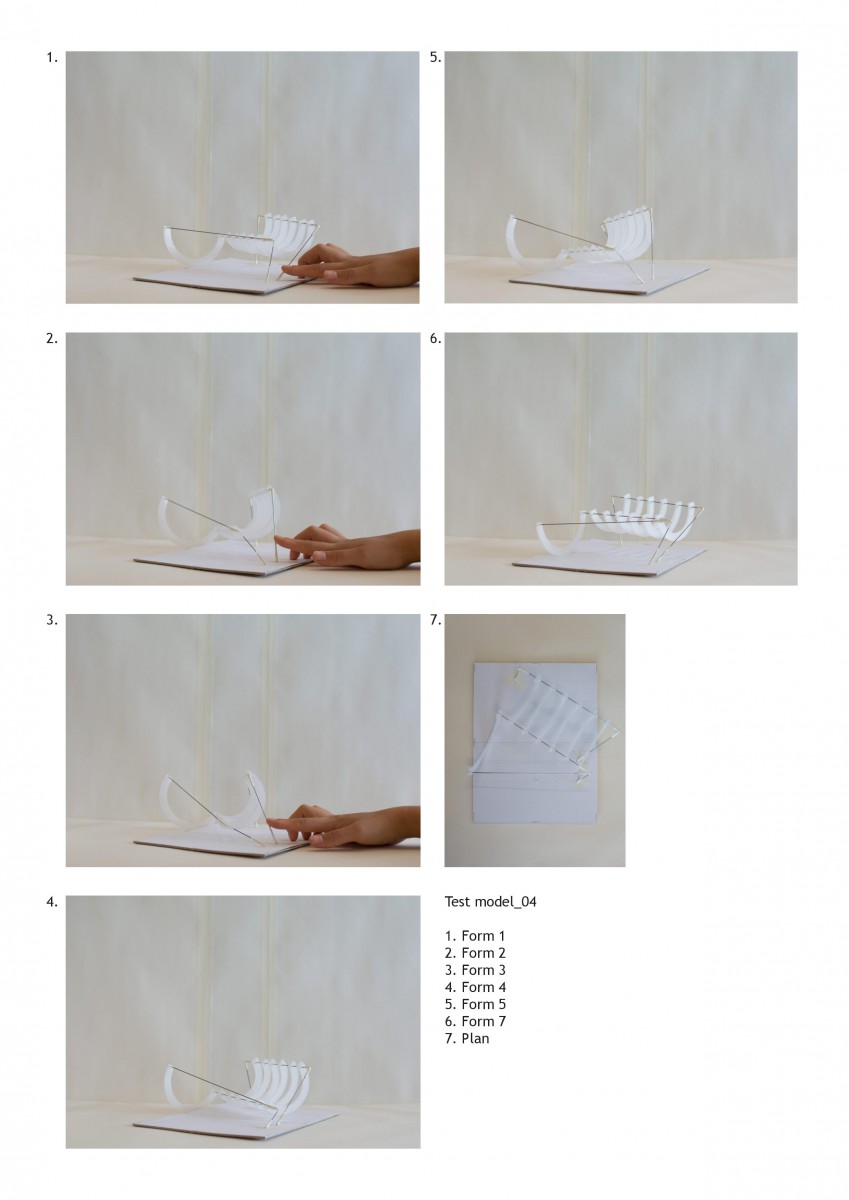
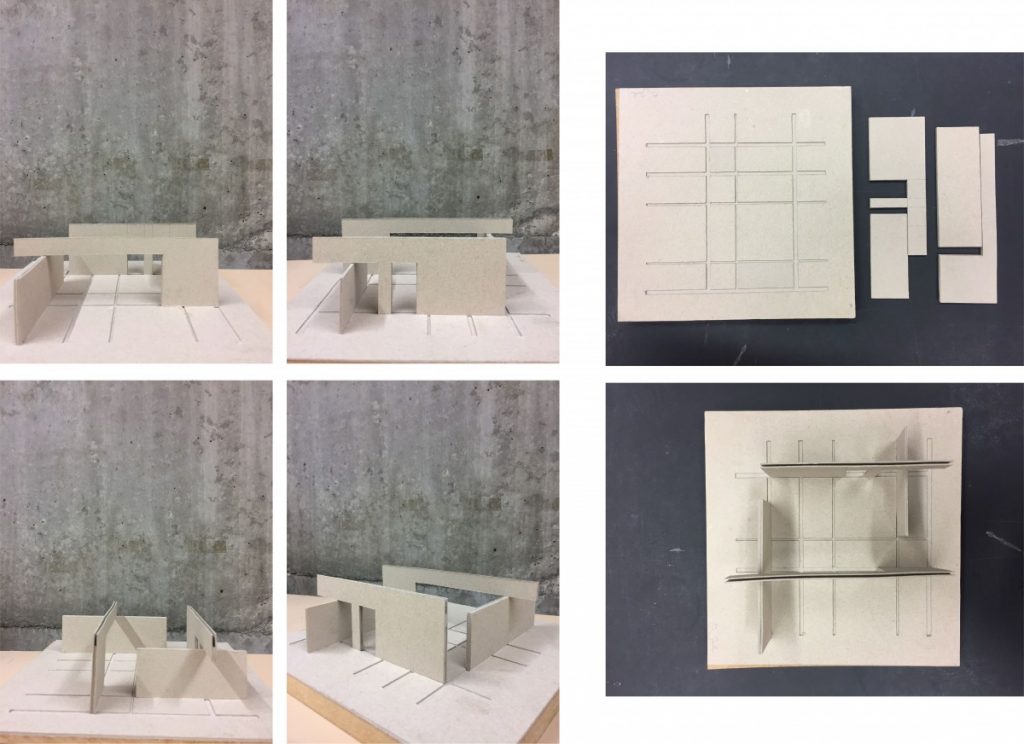
I decided to move the project forward by testing the idea of the four bar linkage across varying planes through simple paper models.
Each of these tests brought about questions of stability, connection points, anchor points, material qualities, thickness, how it meets the ground etc. Potential for the use of colour, thickness and additional elements that extend out from the four bars themselves can be observed. Although a prototype could be developed exploring a solution for such possibilities, I have not been able to push this study to that extent.
Project 3 and 4 has been a sort of research project into robotics, motorised movement and the exploration of what this other world of mobility can offer architecture. No end result as such was assigned throughout the process and I feel that that has allowed me to really understand the possibilities of these tools. I have hit many walls and found myself immersed in frustrations over what architectural meaning this project presents but overall, it has been incredibly fun and challenging taking an alternative approach to architectural design.
Master thesis final submission
Compression-only based structures. Discrete element assemblies, double curved surfaces, shell structures, mesh tessellation and digital production
This master thesis is a research based project which explores compression-only based structures, covering such subtitles as – discrete element assemblies, double curved surfaces, shell structures, mesh tessellation of symmetrical and asymmetrical geometry together with digital production used for testing structural behavior of masonry structures. The background of the current research project was based on the works of Block Research Group. During this stage two different softwares were analyzed in comparison to each other (RhinoVault and Kangaroo2 for grasshopper) and the physical model of both structures was made. First experiments as compression-only based physical models were 3D printed from PLA and failed. Moving forward the further research methodology was developed – to start testing from simple structures – like arches and step by step by adding different variables explore the complex systems such as vaults, domes both single and double curved and finally – symmetry and asymmetry. This comprehensive analysis from the simplest element – arch to the most complicated sample – asymmetrical free form vault helped to deepen an understanding of behavior of such structures while testing the impact of thickness, curvature degree and curvature type, tessellation type and joints between the elements design. Furthermore, project covers digital production and fast prototyping techniques – 3D modelling, parametric modelling and 3D printing together with all challenges which can occur during translation of digital model into the physical model. Conclusions of the research project and implementation into the architectural field are proposed as analysis of adaptation to flat and uneven terrain, together with the analysis of different possible combinations of shell structures into the one whole system called mereology – in philosophy and mathematical logic, mereology is the study of parts and the wholes they form.
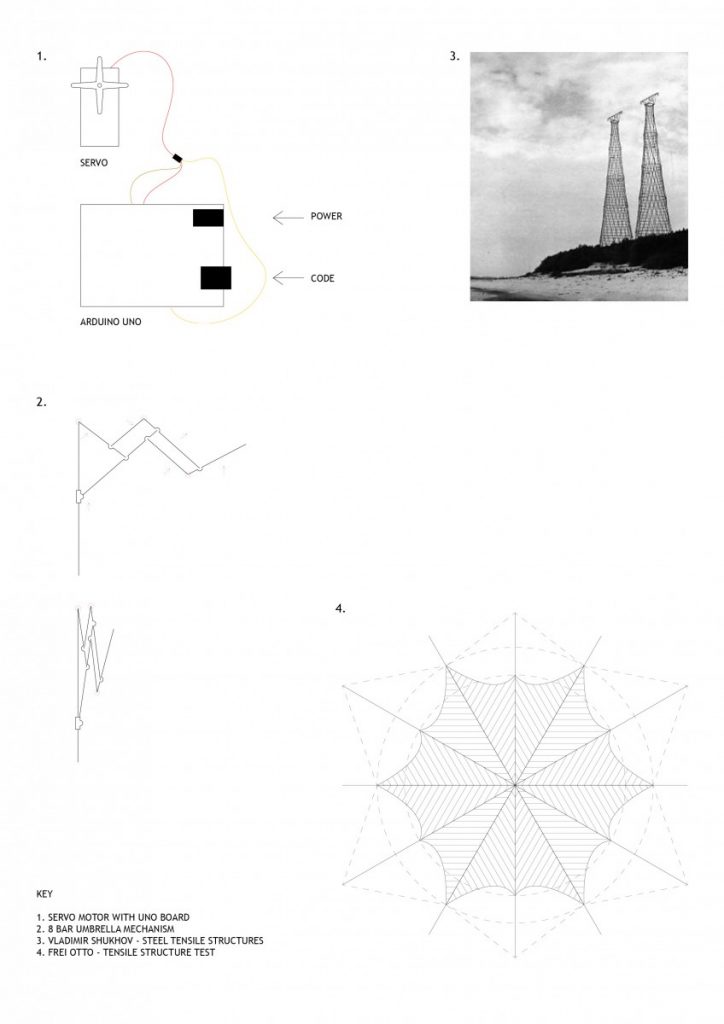
Project 04 saw a move to material prototyping and developing a methodology for building three dimensional forms. I looked into Frei Ottos fabric tensile structures as well as engineer Vladimir Shukhovs steel tensile structures as precedent.
Keeping the automated robotic theme running I also decided to incorporate a servo motor into my design process. This brought a moving element to the prototyping and prompted the research into the umbrella mechanism and three/ four point linkages.
I also explored the Kaleidocycle (flexagon) which are models of linked tetrahedra which turn through their centres. I wanted to incorporate these methods for materials that, through their connection, could change form and produce multiple spatial environments.
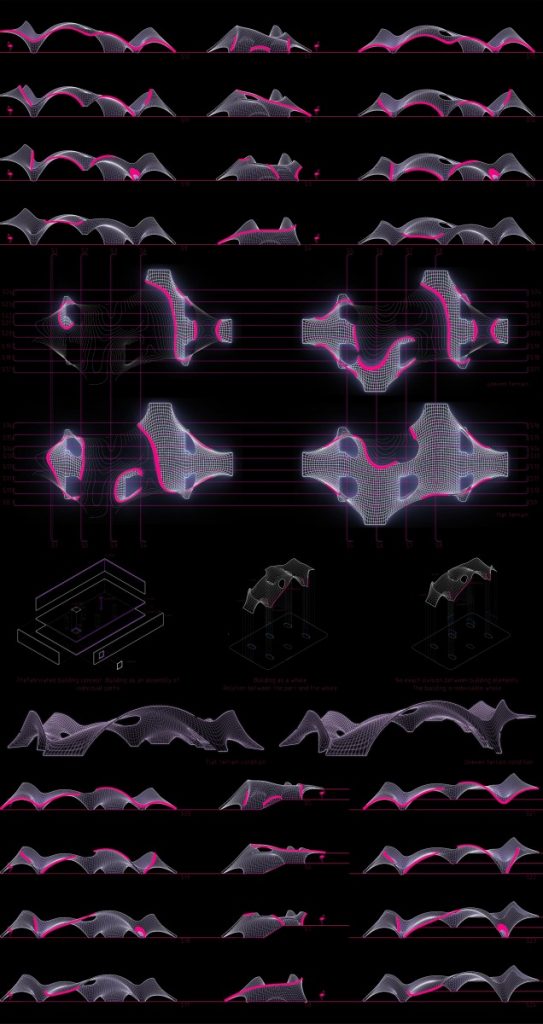
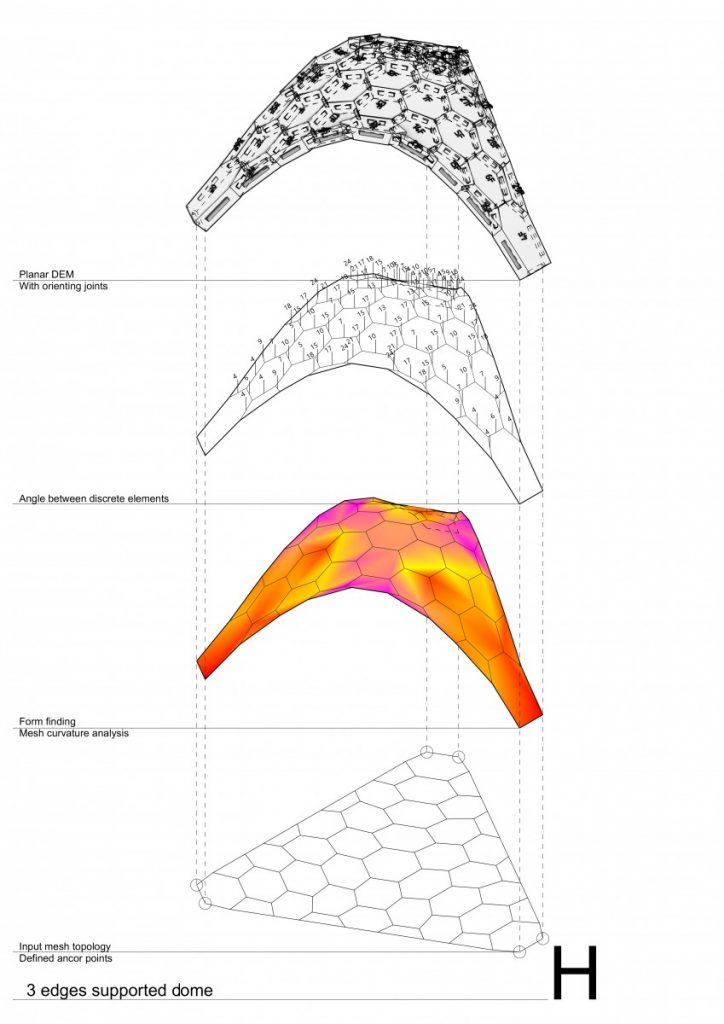
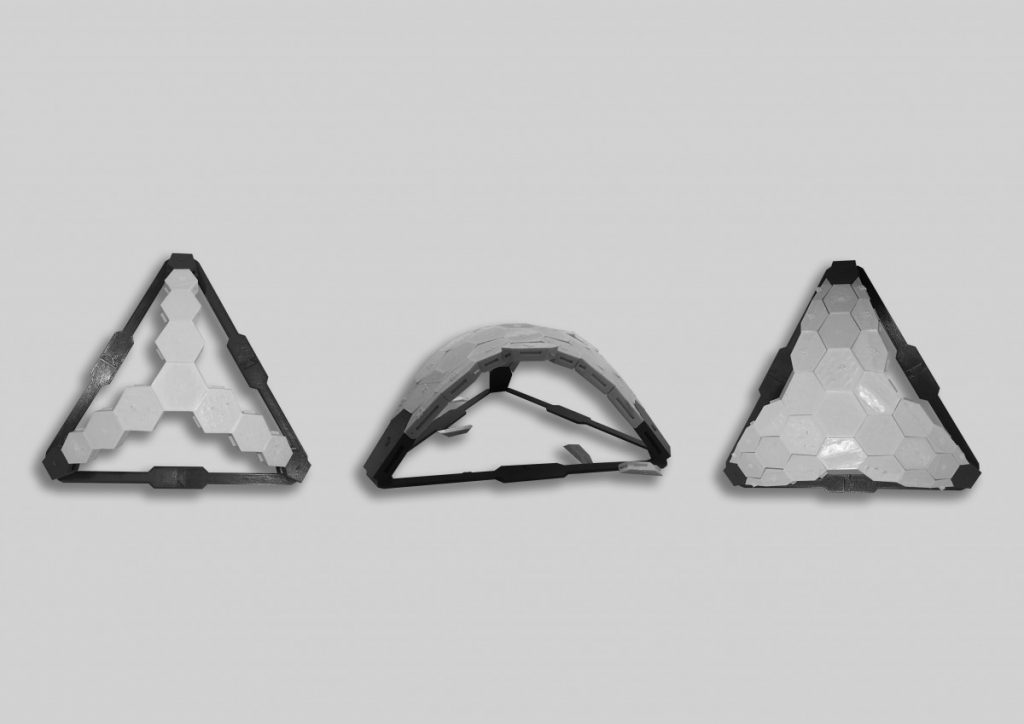
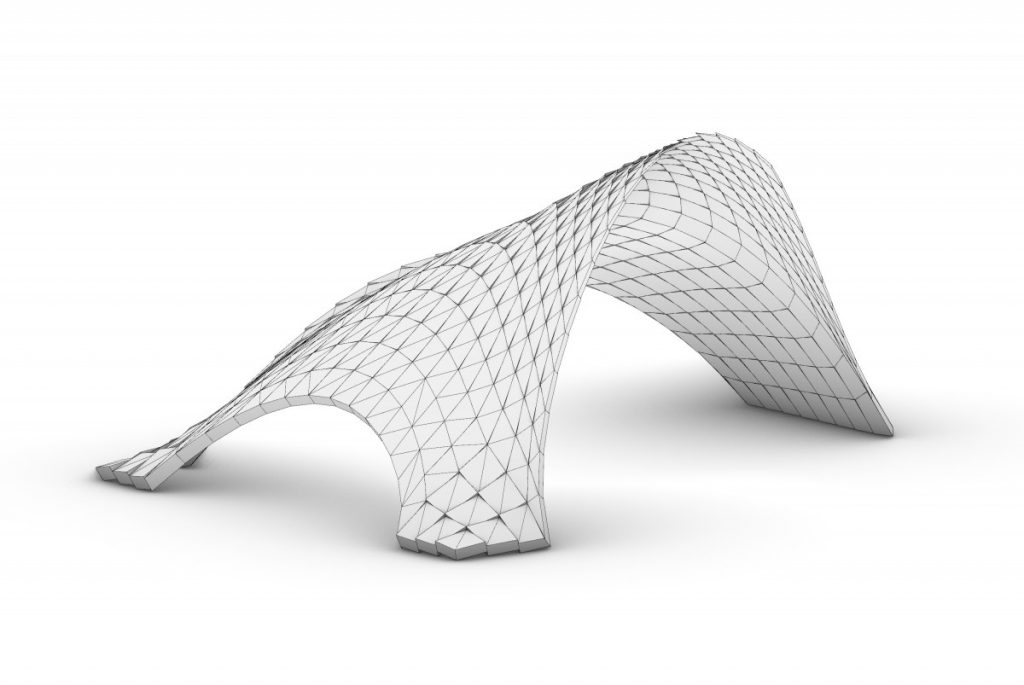
Further development of the thesis project – testing 3 supports supported dome structure worked. Although the side elements tend to fall away and do not have any structural performance in the whole model.
Having a medial spine helps during the assembly process and once it is assembled all other elements can be easily attached to each other.
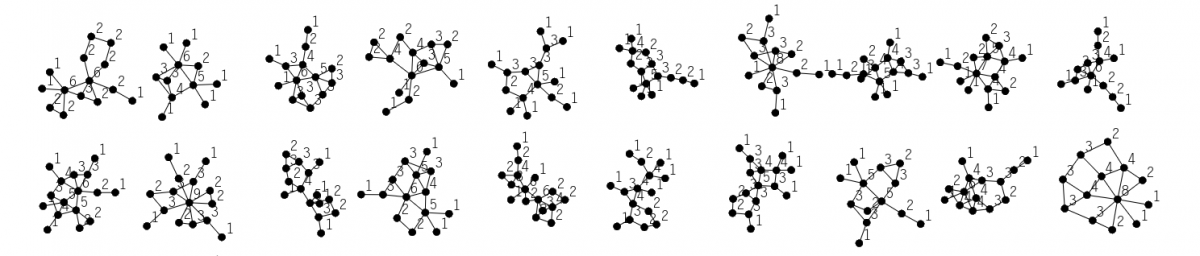
Documenting symmetrical 3 supports supported dome structure with hexagonal tessellation pattern
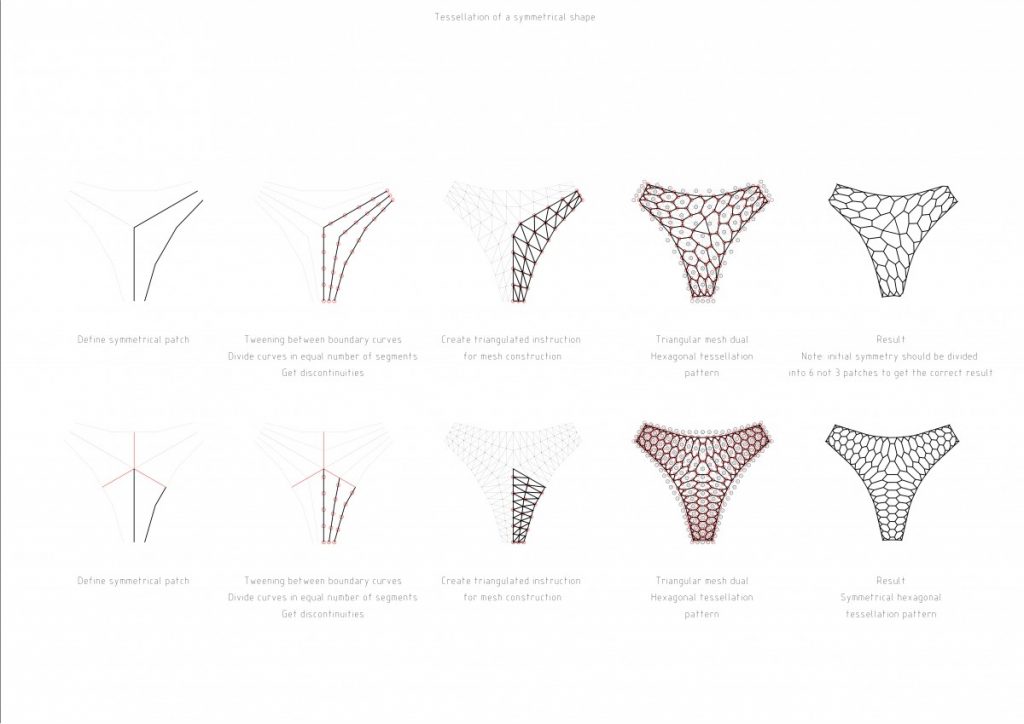
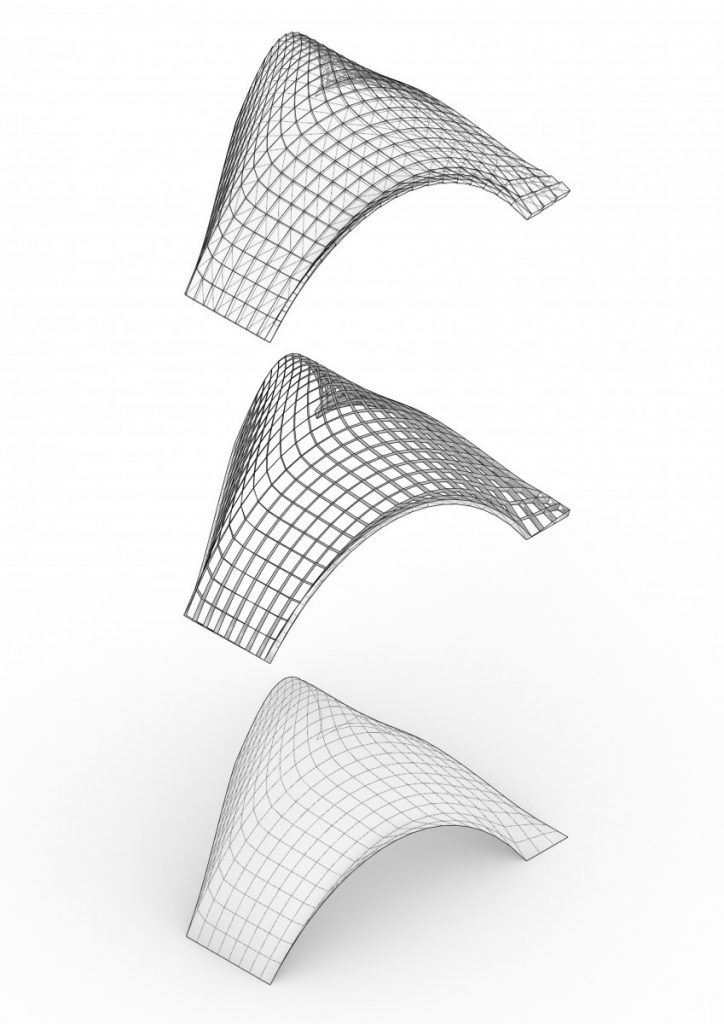
Some additional information according to the tessellation of symmetrical and asymmetrical shell structures could be found in the diagrams below.
Tessellation of a symmetrical shell
Tessellation of an asymmetrical shell
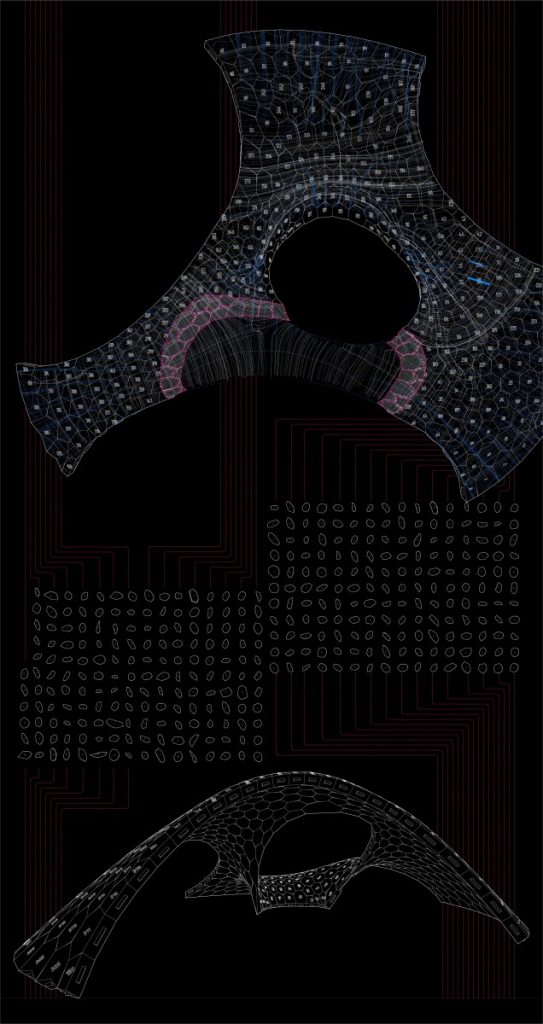
While working with symmetry gives an opportunity to automate the process in Grasshopper, working with an asymmetrical shapes requires some background knowledge, starting from medial spine to understanding of a force flow in the discrete element shell geometry to size of each voussoir and as for now is drawn manually. Furthermore, it is impossible to stick with a same number of vertexes for each detail, so the whole tessellation becomes an n-gon pattern.
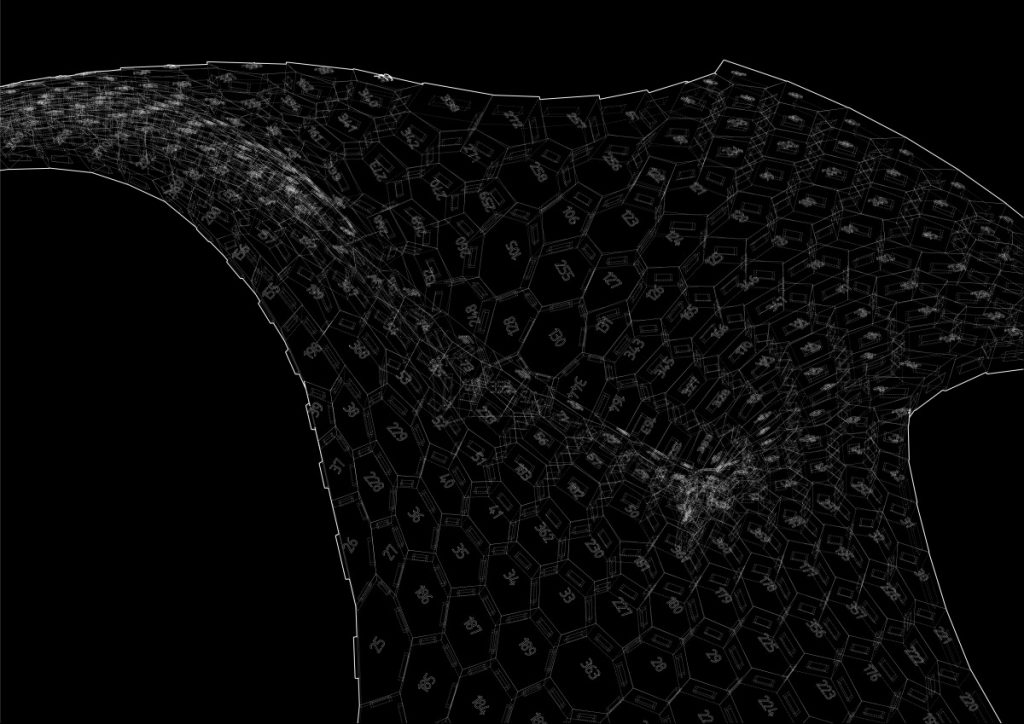
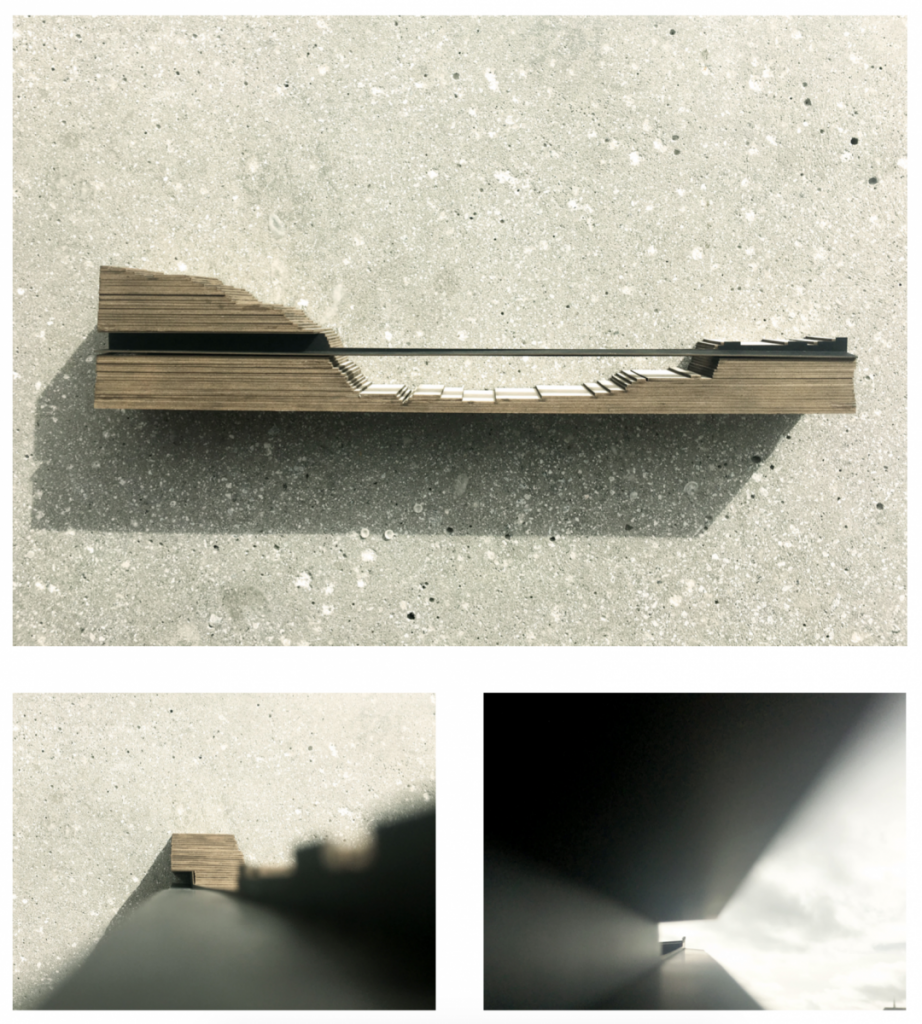
Final model for testing asymmetrical discrete element shell on a flat terrain condition, size – 70x70x20cm, number of elements ~380 pieces.
Fragment of an asymmetrical model on a flat terrain condition
Layout of details
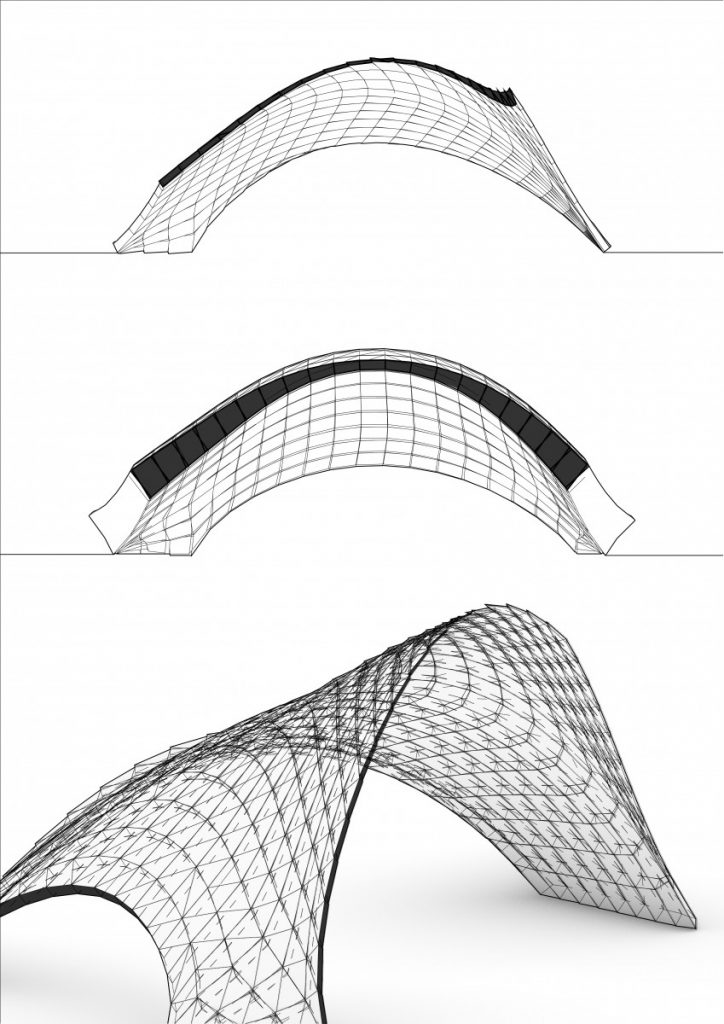
And finally first experiments with different thickness of a shell from DE.
Mesh offset by face normals using remaped amplitude
Scheme showing the different thickness of a shell having the thicker supports and thinner top elements
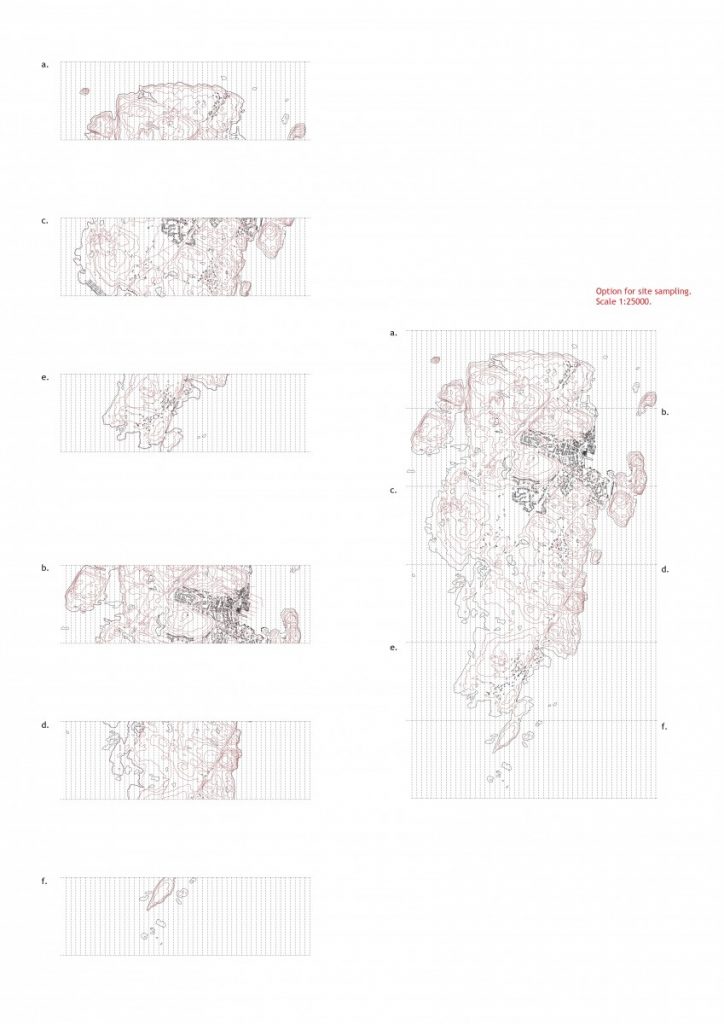
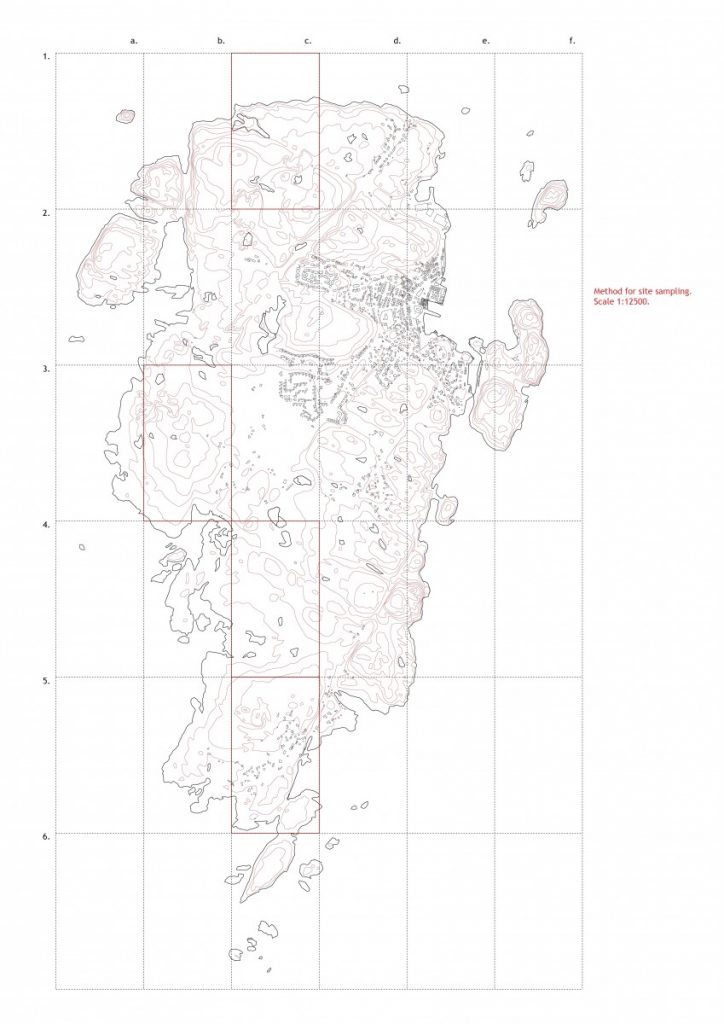
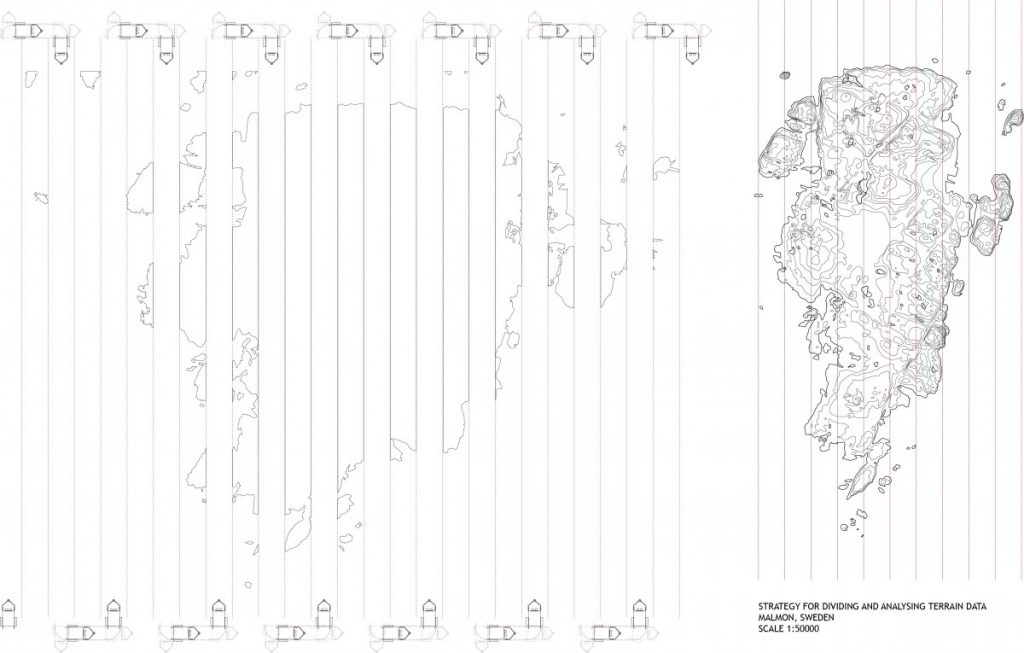
Moving on from the last pin-up I needed a better management strategy for the site data. When the robot reads and responds to the site it needs to be at a scale that the data is useable and realistic for the architectural design to be implemented. Providing a grid system allowed a reading of the entire terrain in greater detail where each grid tile can be blown up and analysed. Consideration was also taken for the dimensions of a manageable testing area for repeated demonstrations and data collection. Below are two possible methods of grid reading of the site. The maps were sampled at 1:500 scale with the second method of grid division.
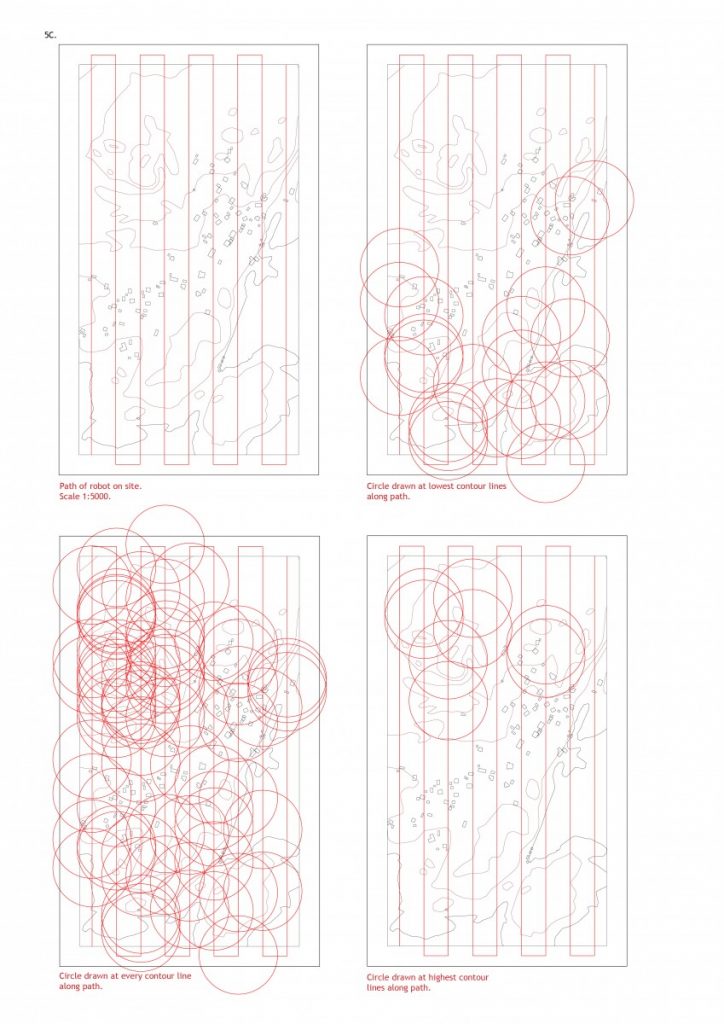
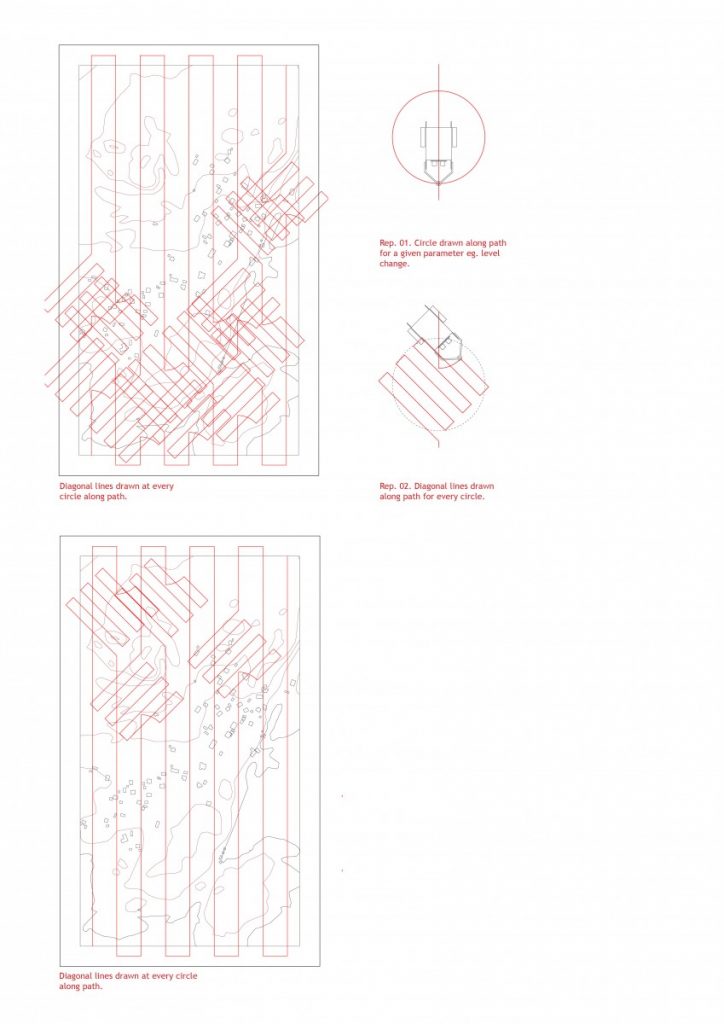
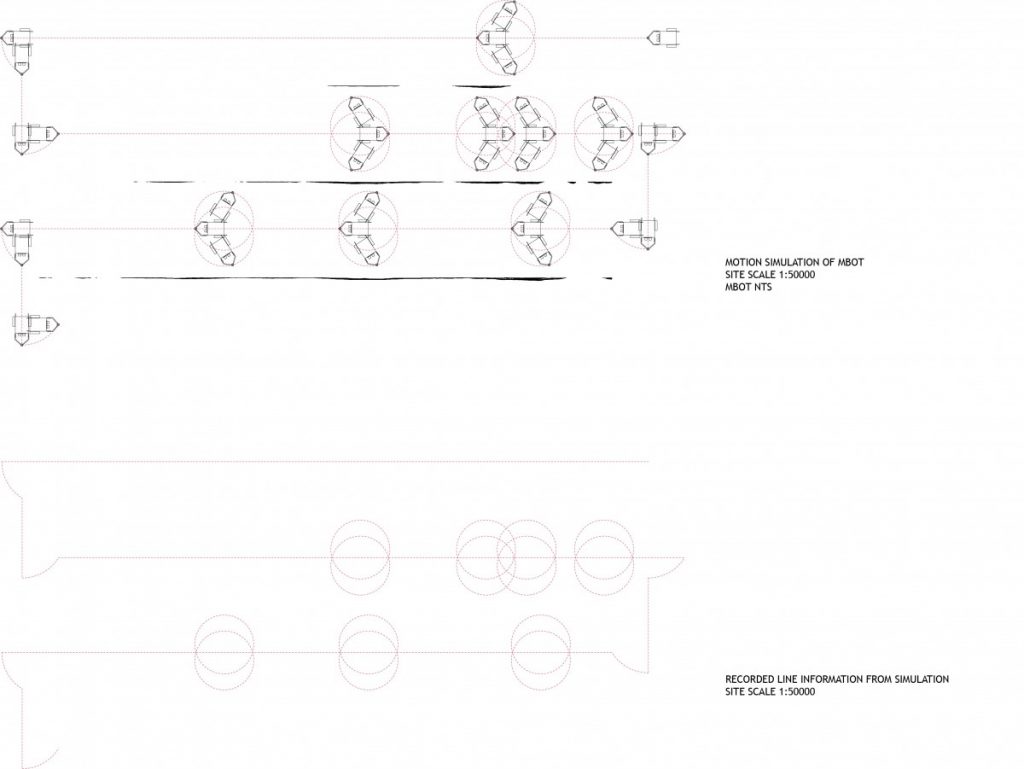
The robot has a narrow range of testing limited to its line and ultrasonic sensors. This provides a linear path of testing at 1cm intervals on the sample map which would be every 50metres in real life. This gives a dimension and scale to any output that will be collected. In the simulation drawings, the robot is to respond to the changes in height at any level changes, changes at the highest and lowest areas. The output is a full 360 rotation of the robot leaving circles as the response. The robot is allowed to respond to its generated data again and draw diagonal lines at a 45 degree angle at every circle. This then gives a criss cross of linear data that the building system of precast members could be assembled upon.
‘Flat pieces cost one dollar, single curvature pieces cost two dollars, double curvature pieces cost ten dollars. The good thing about the computer is that it allows you to keep a close control over the geometry and the budget.’ – F. Gehry
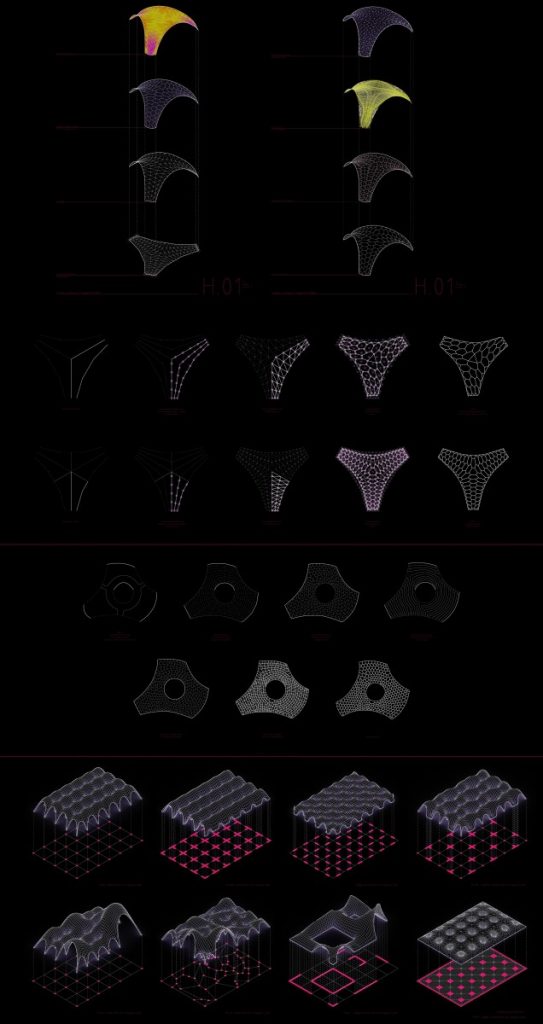
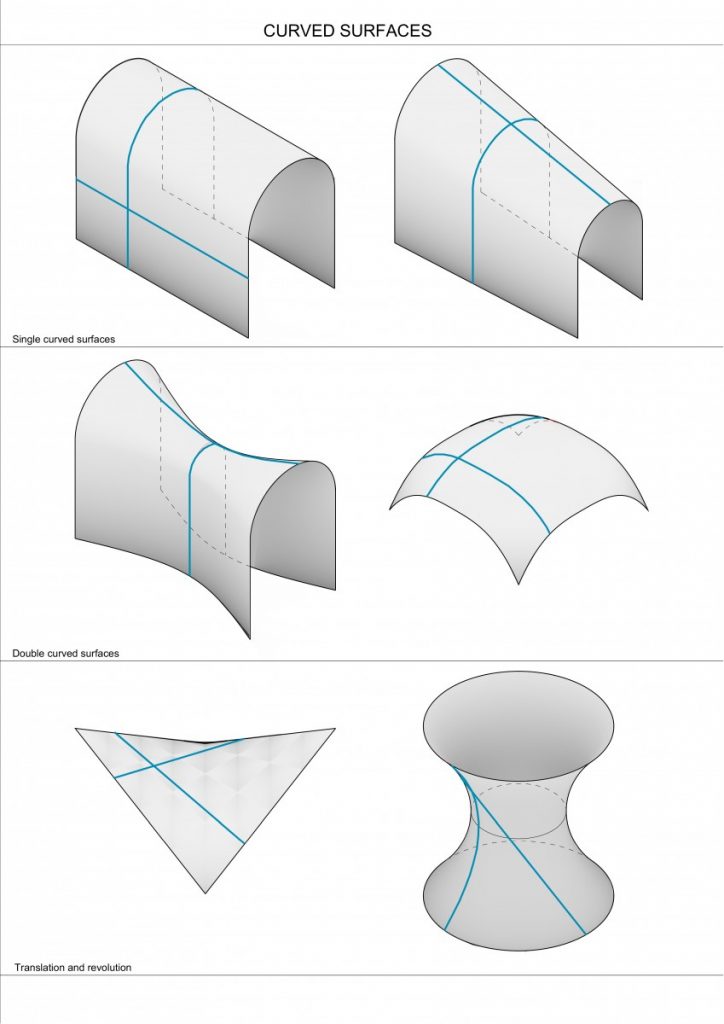
Single Curved Surface – only one of two curves is actually curved, making this shape developable (in mathematics, a developable surface is a smooth surcafe with zero Gaussian curvature, meaning it could be flattened on plane without distortion).
Double Curved Surface – non-developable surface. Saddle shell has compressive stresses along the convex curvature and tensile stresses along the concave curvature. In the 2nd dome example when both dimensions are curving in the same direction meaning that the dome is under compression everywhere.
Hyperbolic paraboloid is a double curved shape which can be created with straight lines, yet non-developable. Both hyperbolic and conical paraboloids has excellent tensile and compressive properties and can be built with straight members, that making the production relatively cheap and easy.
Source: The Function of Form by Farshid Moussavi
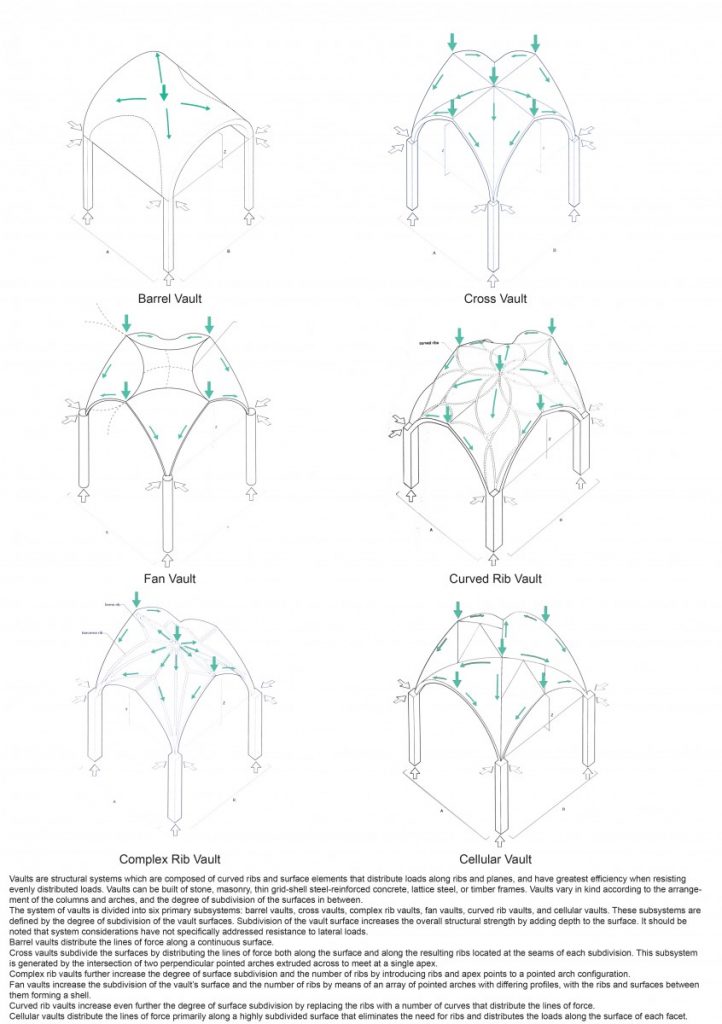
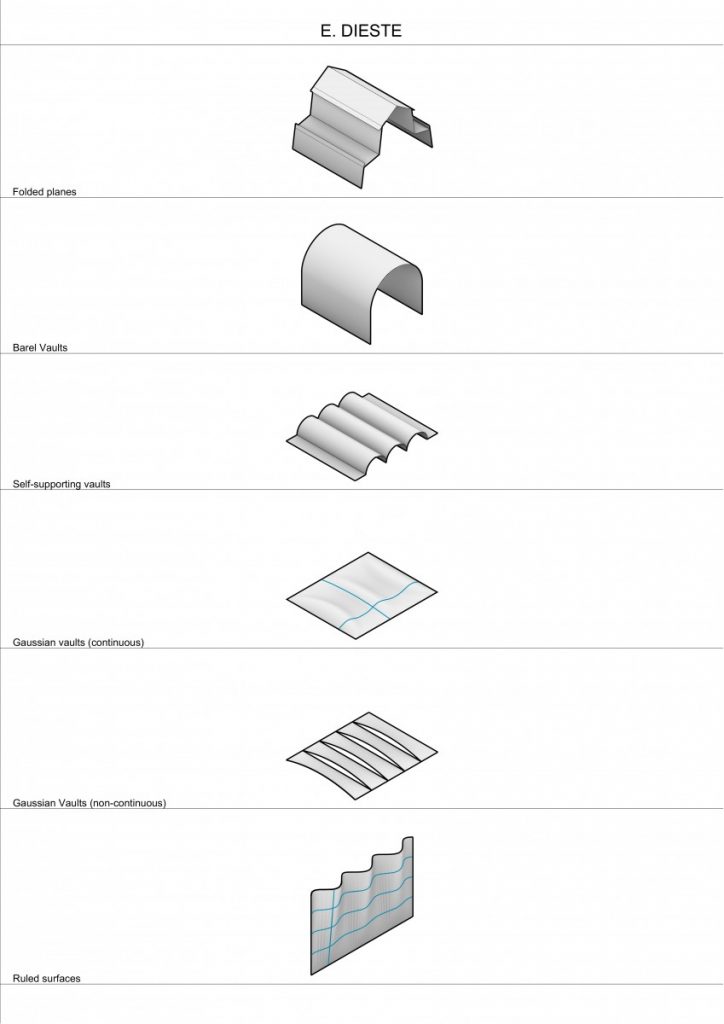
Vaults are structural system which are composed of curved ribs and surface elements that distribute loads along ribs and planes, and have greatest efficiency when resisting evenly distributed loads. Vaults vary in kind according to the arrangement of the columns and arches, and the degree of subdivision of the surfaces in between.
Can be divided into 6 primary subsystems defined by the degree of subdivision of the vault surfaces.
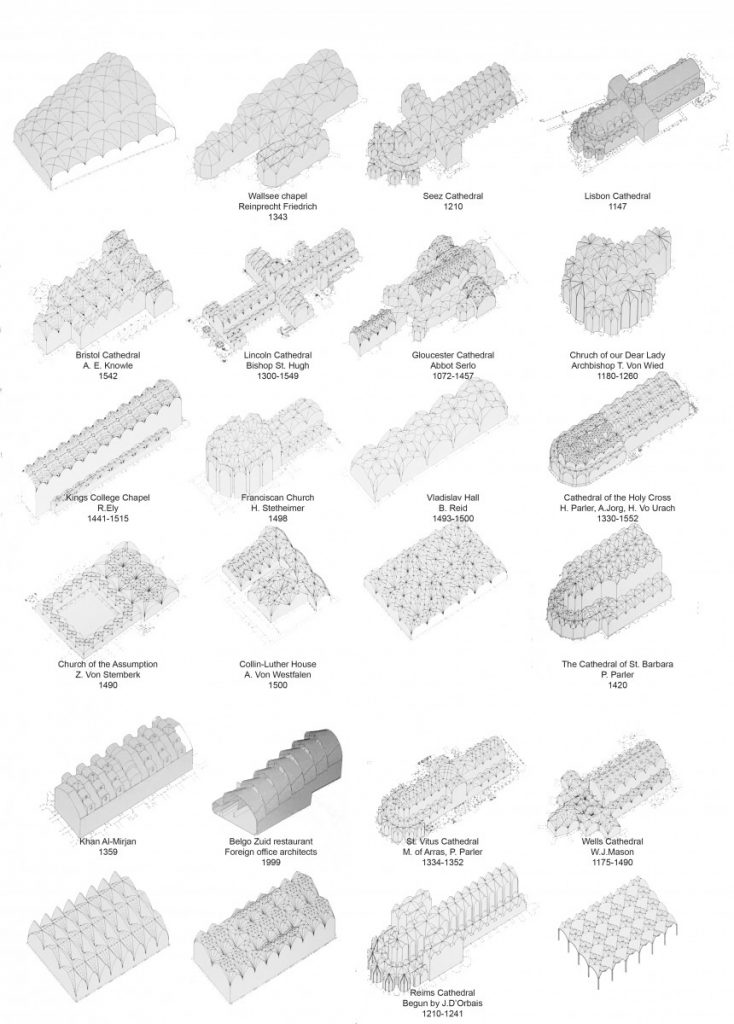
There are many great examples of vault architecture built in the mid-centuries, mostly used for sacral building. For the most of these examples building process took even several centuries. Most of them were arranged as a tessellation of the same symmetrical element, although even then some elements in the building system were trying to break the symmetry.
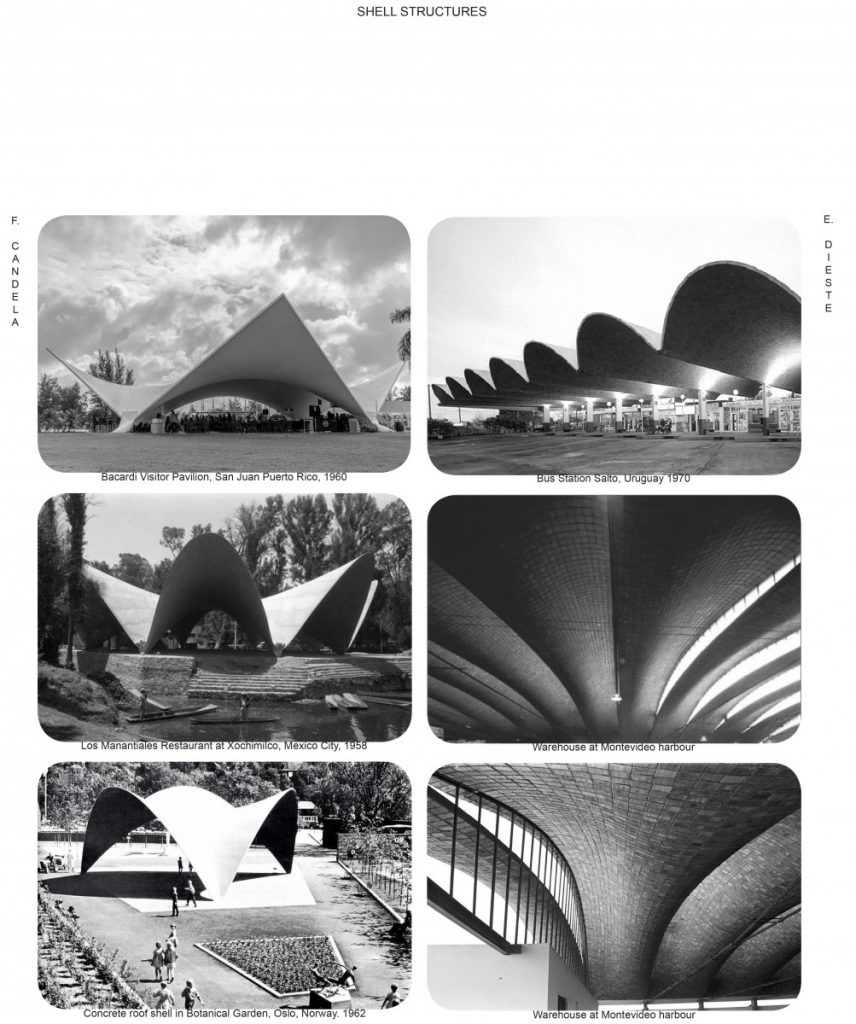
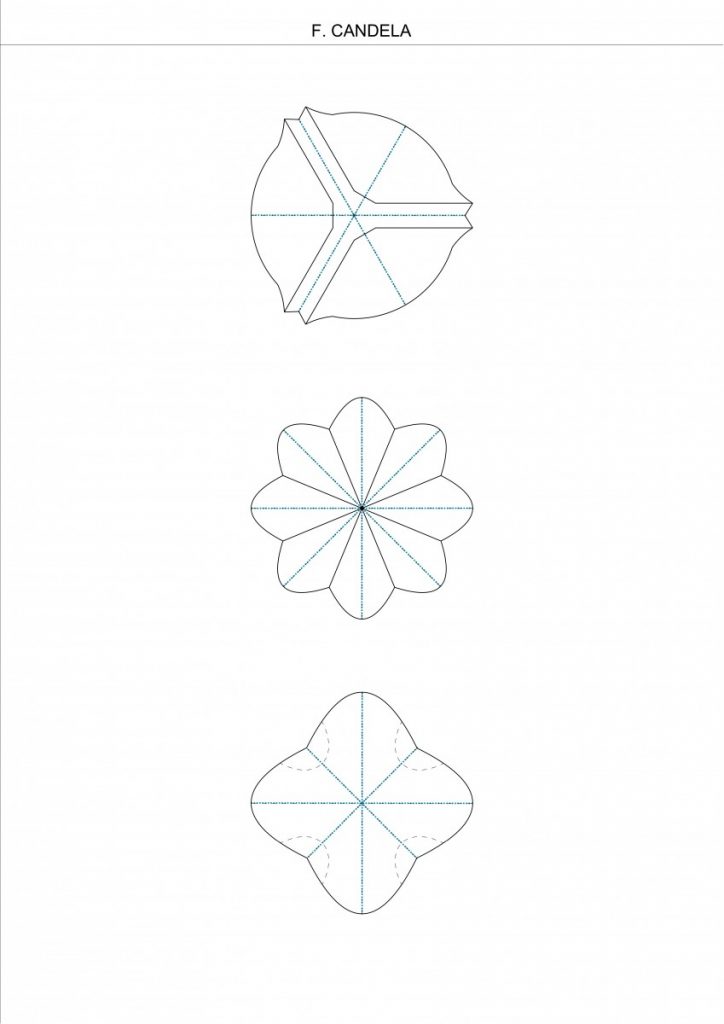
At the 20 century there were two architects – engineers working with curved surfaces – Felix Candela – concrete single surface shells and Eladio Dieste – mainly exploring the masonry structures.
In the works of E. Dieste we can find the same repetition of symmetrical elements, thus making the production easier, cheaper and faster.
In the F. Candela’s approach we can find radian symmetry and repetition of the same element.
Same as vaults, shells are composed of surfaces that distribute loads in plane and have the greatest efficiency when resisting evenly distributed loads.
Going forward to present:
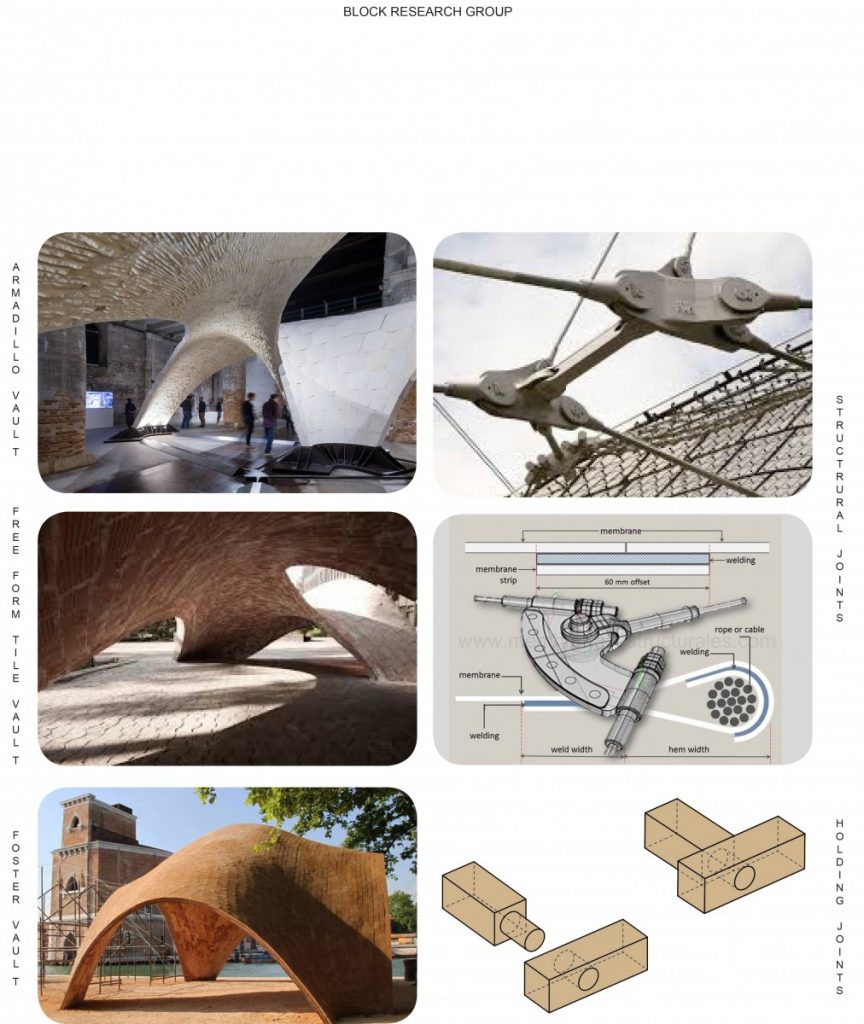
Block Research Group (BRG) for the past 10 years are researching both shell and masonry structures of double curved surfaces. Due to the computational and digital fabrication tools being able to break the symmetry and work with free form structures.
In 2016 at Venice Biennale presenting the Armadillo vault project, which was built from flat stone pieces, without any glue/cement, meaning that structure was compression-only based.
There I want to discuss two different types of joints – the structural and the holding or orientational ones (such as mortise tenon joint). Structural joints – such as found in Frei Otto buildings or Japanese temples are the elements which basically holds all the structure and loads, meaning that without them it is destabilized and without equilibrium, meaning that they are extremely expensive and complex.
When the structure is in equillibrium itself – meaning it is stable by itself, the joint ensures the stability of it according to the external factors, such as wind, earthquake, explosions, hurricanes. For the long-term structures such joints was cement or grooves, sometimes both of them.
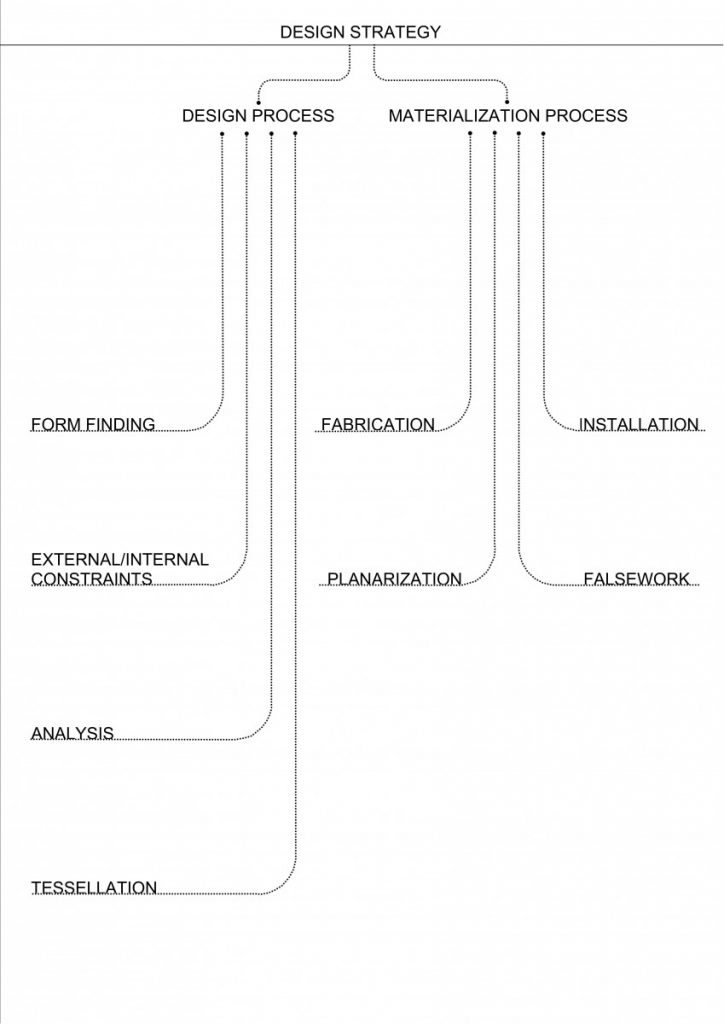
The primary approach for the design strategy in this project was based on BRG research methodology, where it consisted of two main stages – design and materialization. Design consisting of form finding, which can be influenced by external or internal constraints (such as – terrain, sunlight, the size and width with height or openings defined by the architectural program, function, vistas, flows (as movement).
And structural analysis with tessellation of a shell.
Production is mainly consisting of two main parts – fabrication and installation.
During the background research I was working with two different plugins – Kangaroo2 by D. Piker for grasshopper and RhinoVAULT by M. Rippmann for Rhino5, the detailed workflow comparison of both of them can be found in the image above.
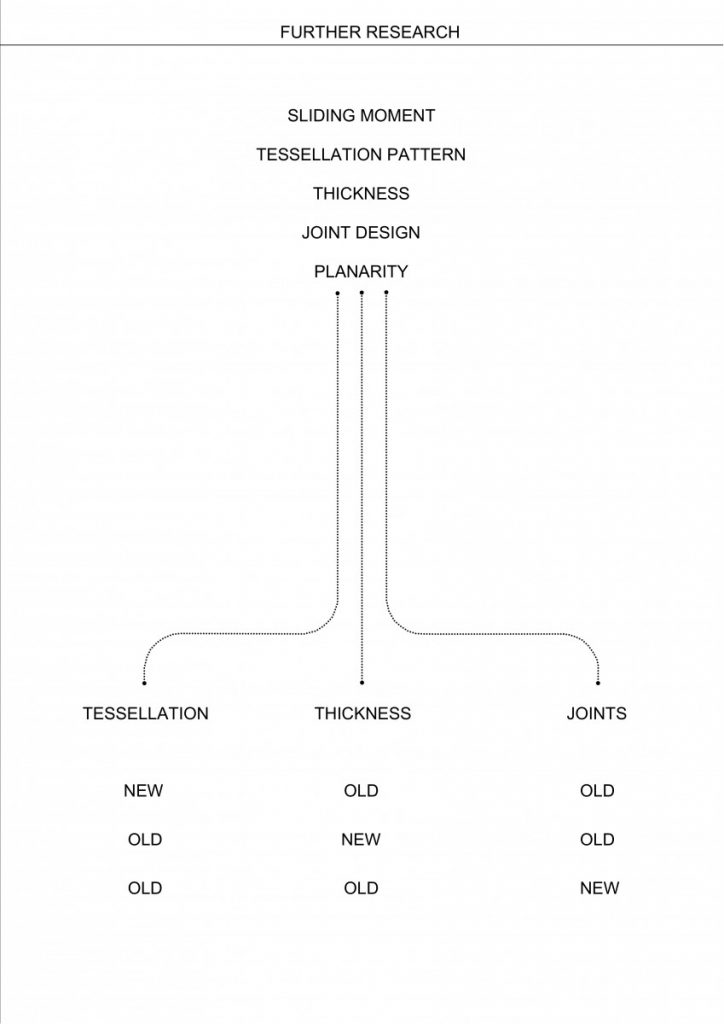
As both experiments with the structures made with Kangaroo2 and RhinoVAULT failed I was able to formulate further research development, defining these main parameters:
Sliding moment or in other words – angle between two elements;
Tessellation pattern;
Thickness of elements;
Orientational joint design;
Planarity of elements (meaning that touching surface is reduced by element’s shift during the planarization);
And decided to change 1 thing at the time.
… And experiment failed again.
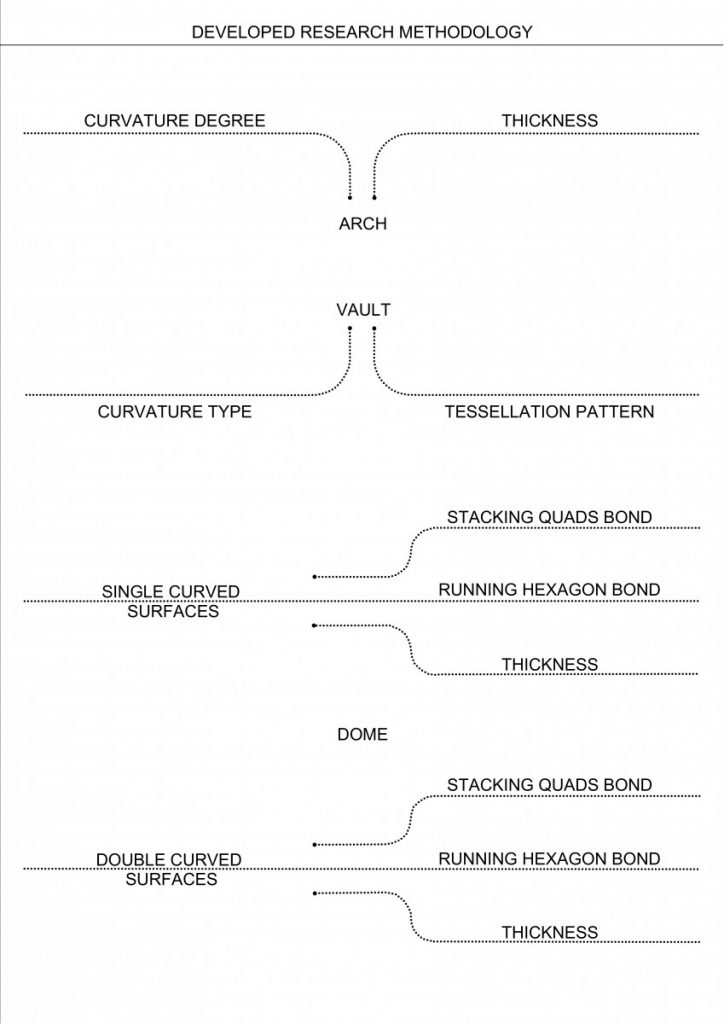
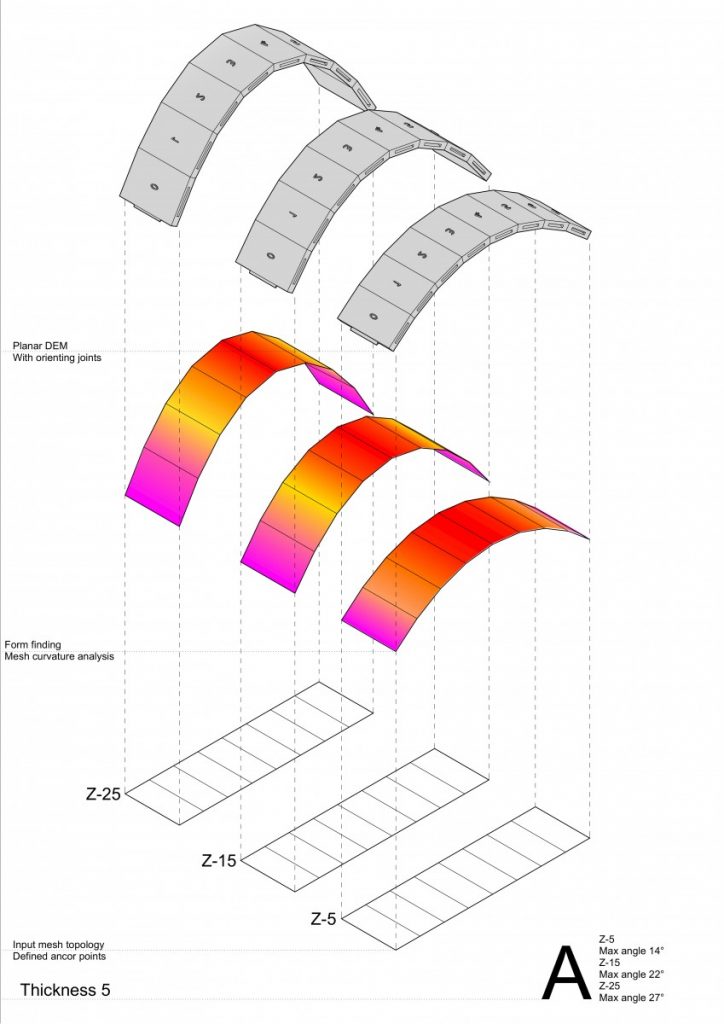
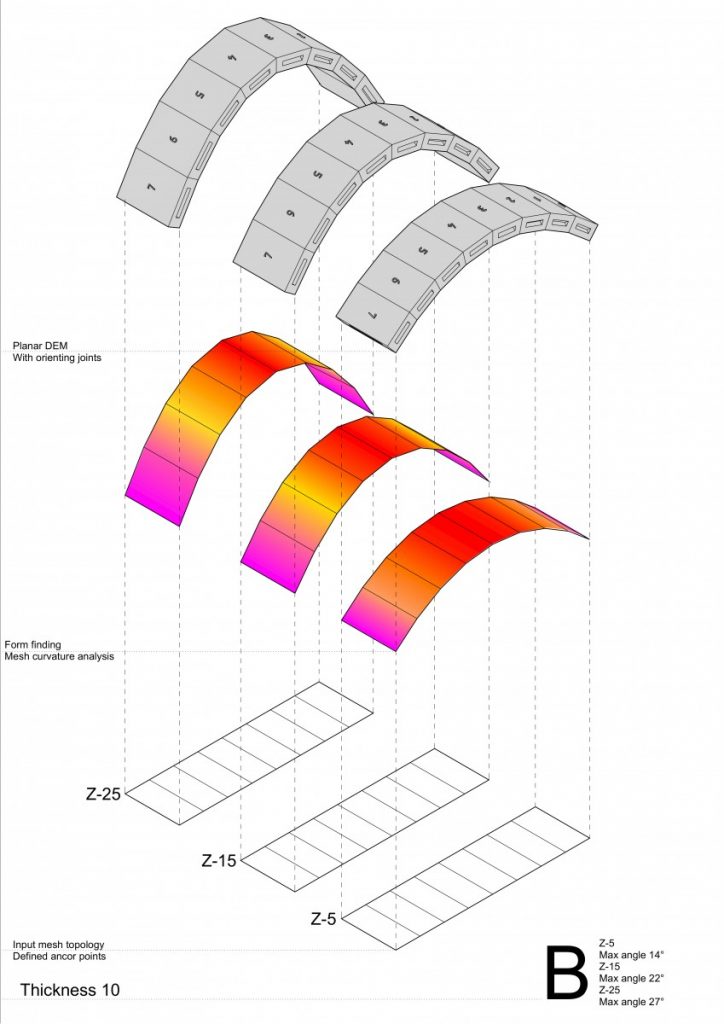
All that helped me to develop my own research methodology – making things clear – to start from simple things, such as arches, where I could test the impact of curvature degree and thickness.
And gladly, this time that worked.
Where I could make clear conclusion about the matter of thickness not so much of a curvature degree.
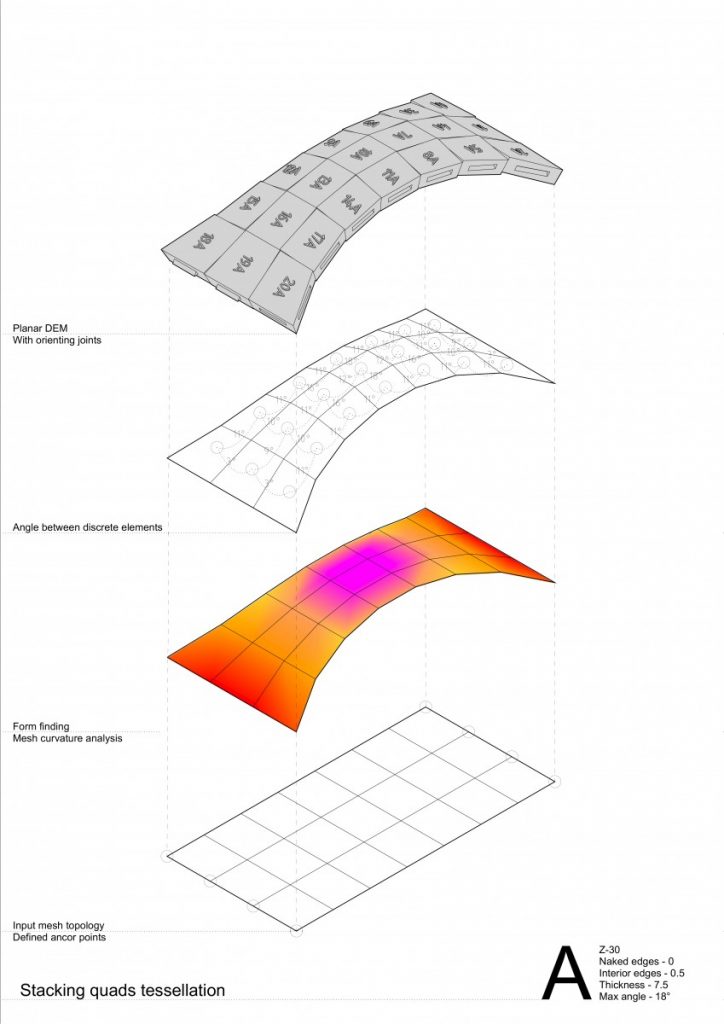
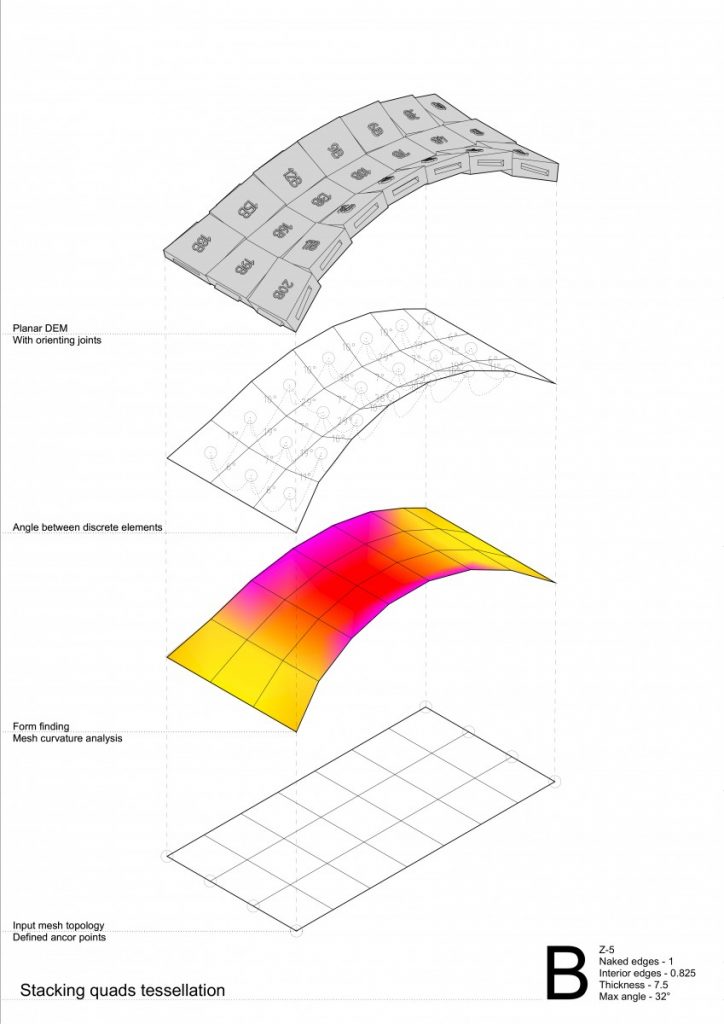
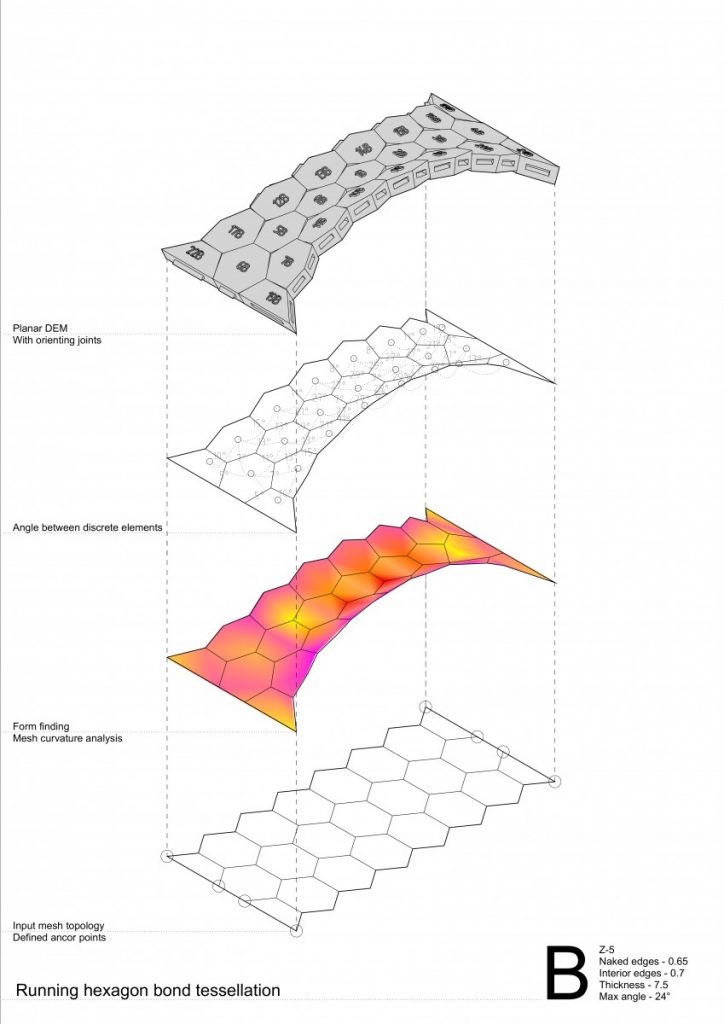
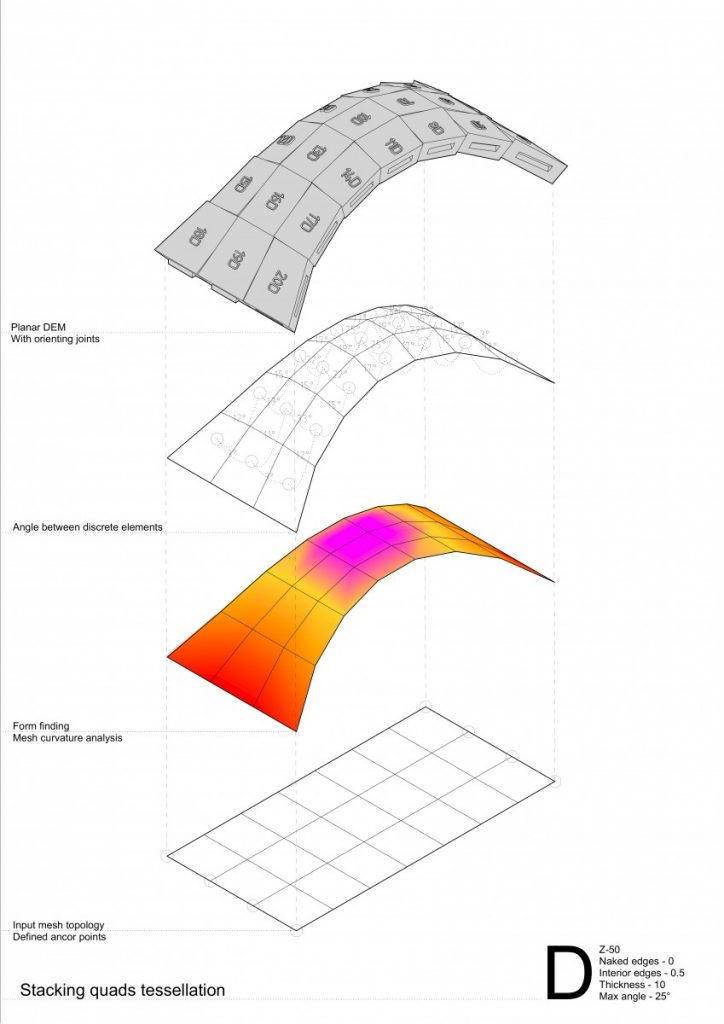
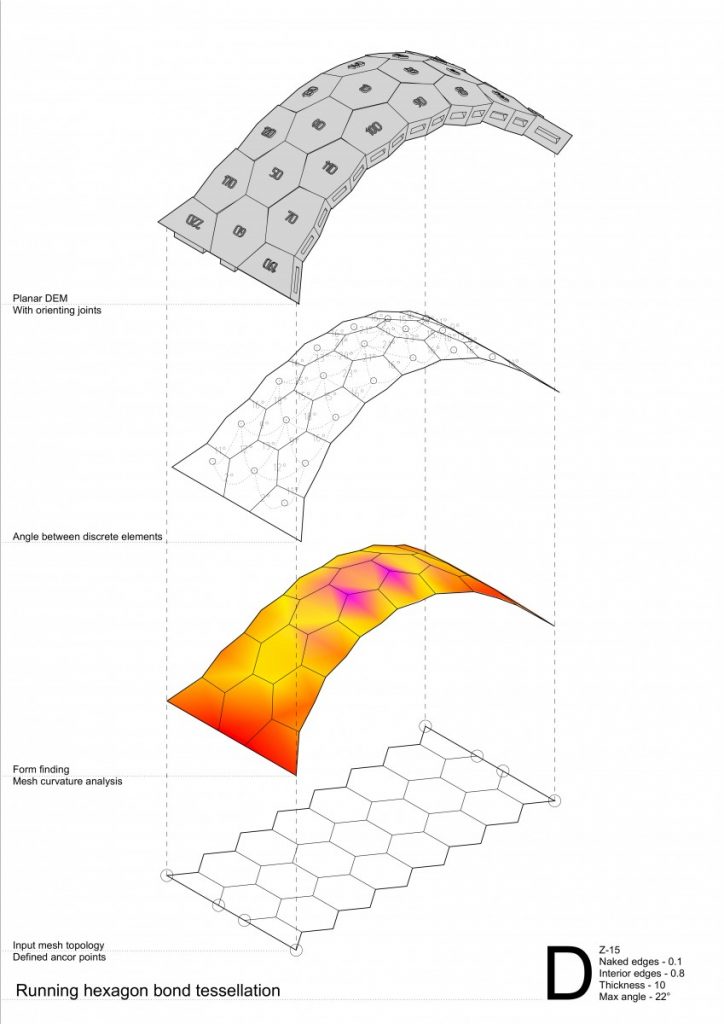
Moving forward to add two new variables – curvature type and tessellation pattern testing in it on more complex geometry – vaults.
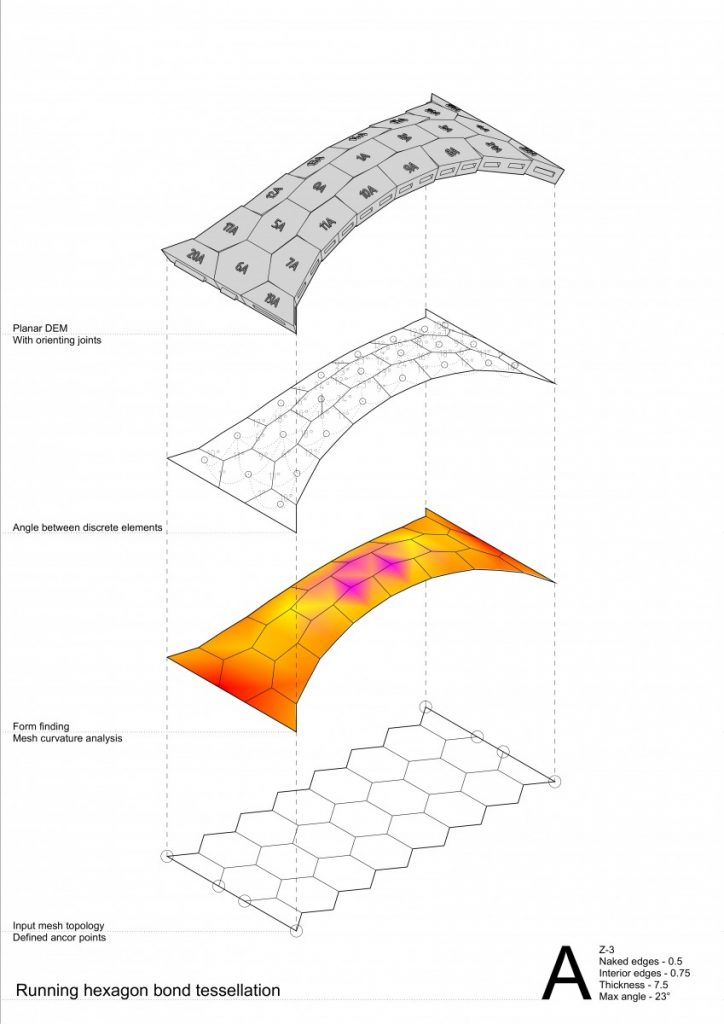
The conclusions made from these series of experiments were:
Running hexagon tessellation has greater behavior of a self interlocking elements;
In convex curvature stripes tend to separate from each other by arches both in stacking quads and running hexagon bond tessellation;
While in concave – convex curvature by forces coming from the side stripes the problem disappears;
Higher degree of curvature or in other words angle between elements has an impact of greater behavior of a compression-only based structures;
Hexagon tessellation in concave curvature tends to higher distortion thus becoming more similar to a quad. If the concave curvature would be even higher – hexagon with tends to have two opposite corners going inside the 2D geometry (reminding a ribbon shape);
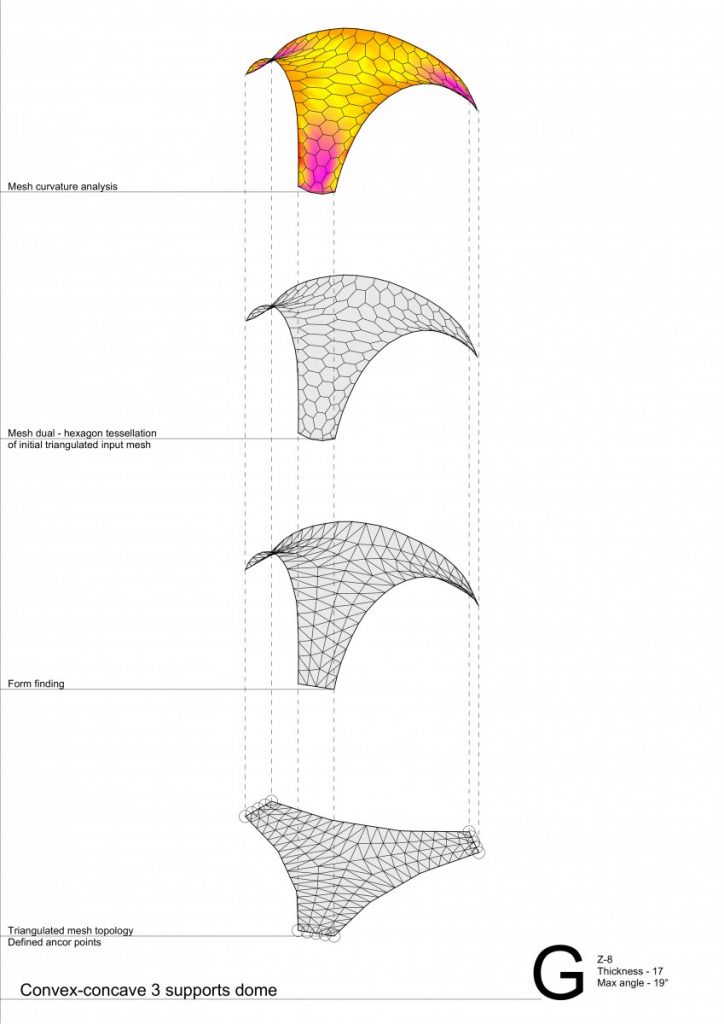
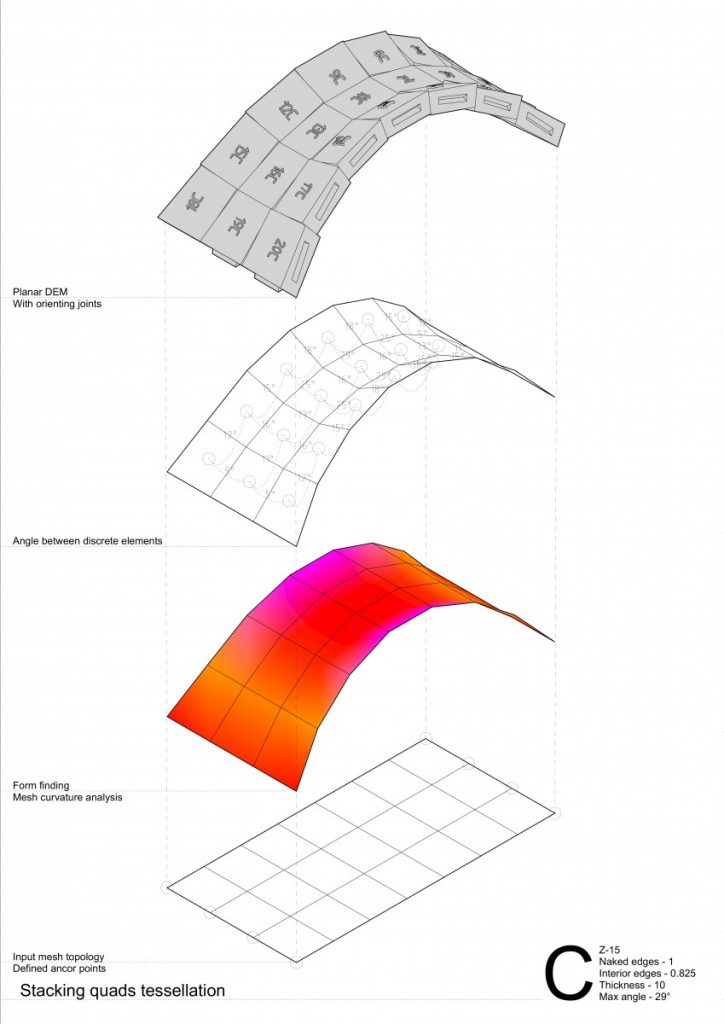
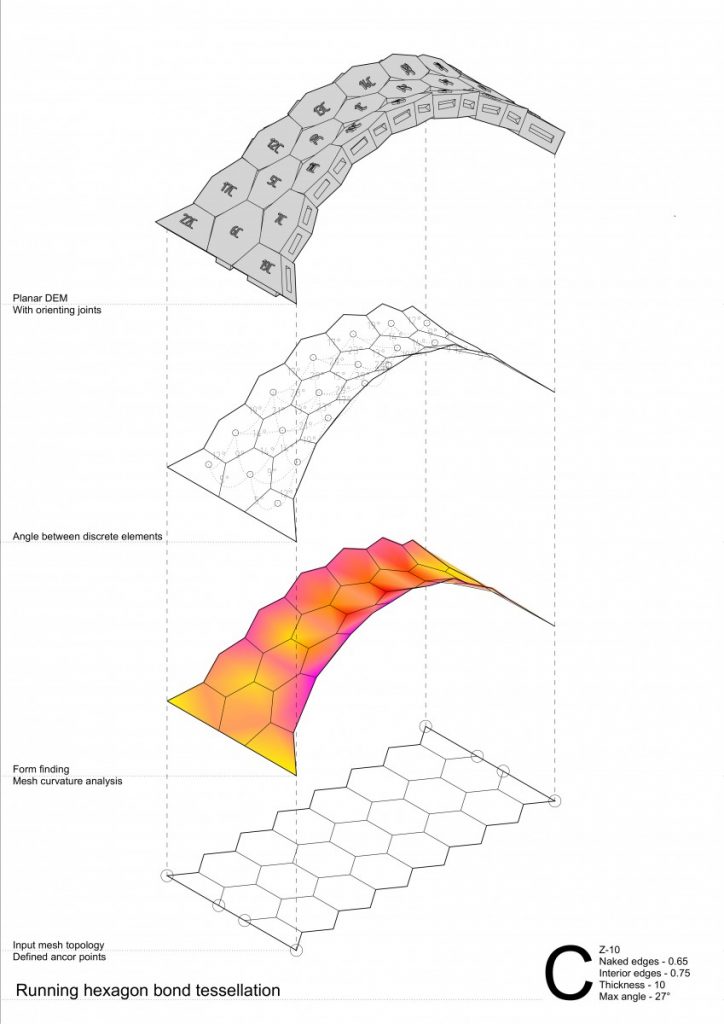
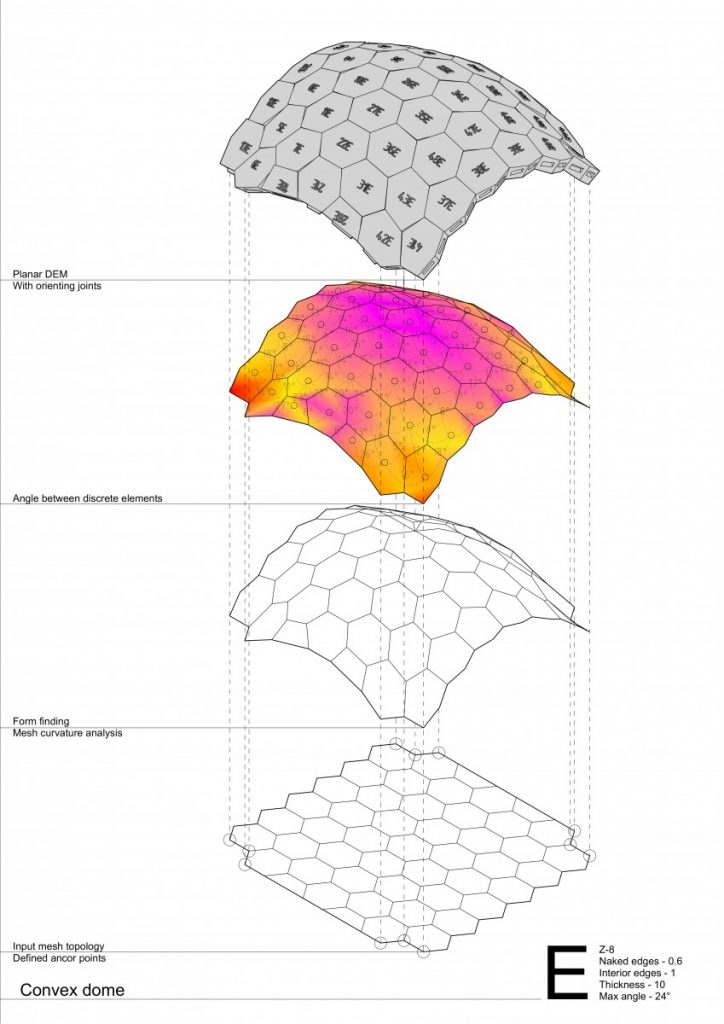
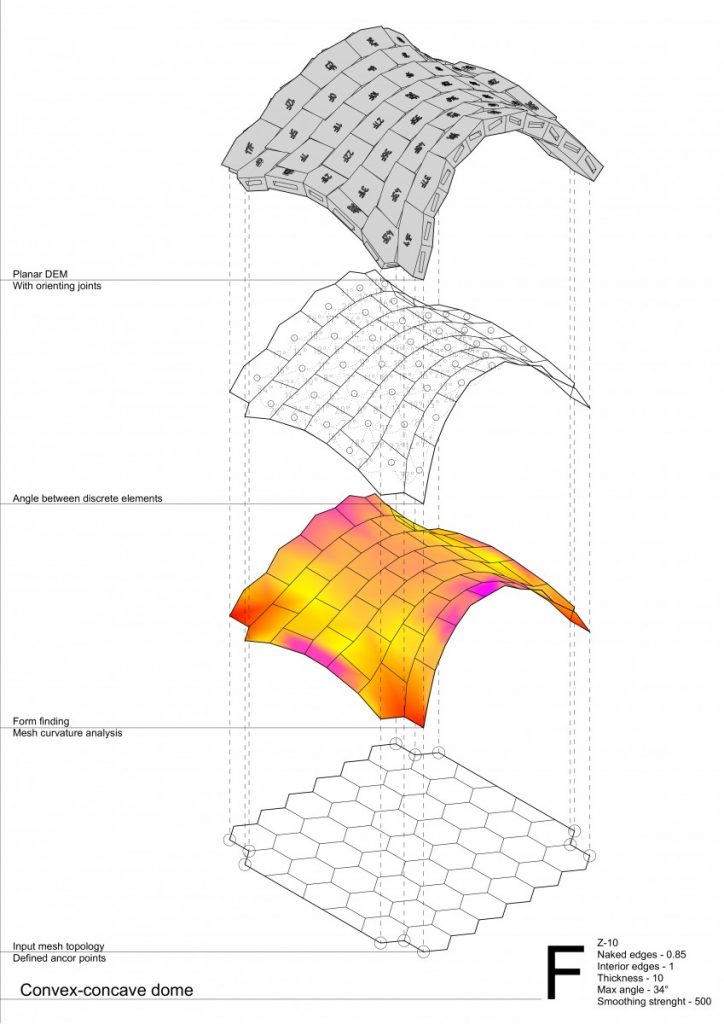
And to move even more forward – testing single and double curvature with variables such as tessellation pattern and thickness on even more complex geometry – domes.
In convex running hexagon tessellation the self interlocking behavior of a pattern feels even stronger, the structure is extremely stable, comparing to all other experimental models.
While convex-concave stripes tend to separate themselves into individual arches, although the structure is stable and distribute even loads very well, able to carry 20x of it’s self weight (doesn’t work for a point loads at all…)
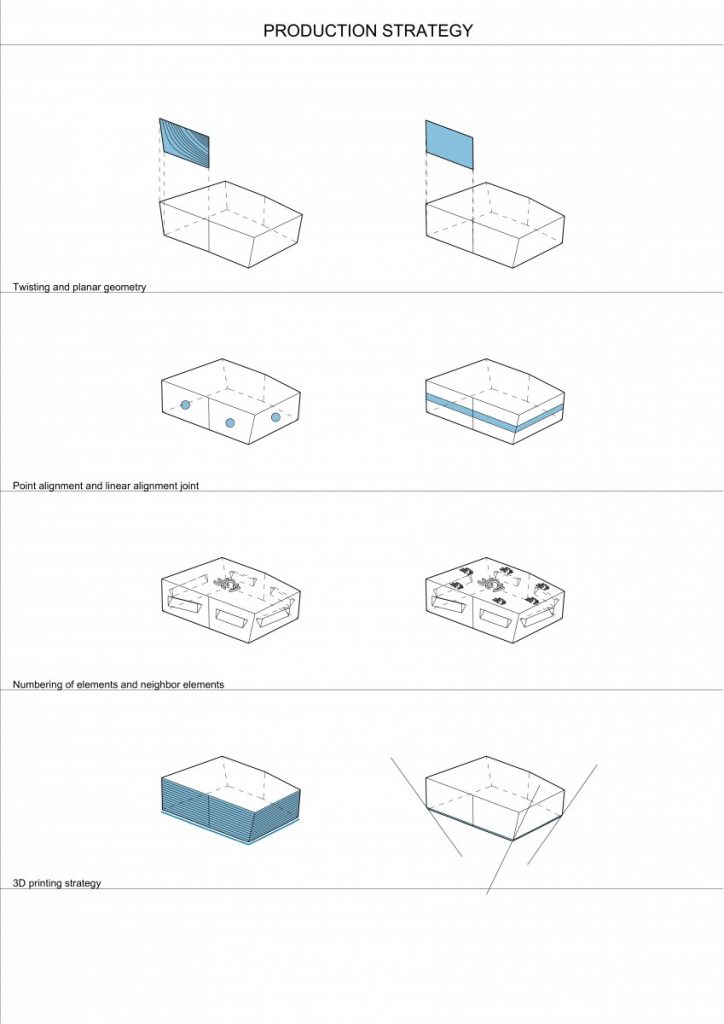
As the production strategy in this project is equally or even more important than a design process I would go through key points:
Twisting and planar geometry – rapid and easy production is impossible having twisting geometry, therefore discrete elements needs to be planar and 3D printable or easy to cut;
As from the previous research it was clearly seen that points loads with the radius of 2mm and the height of 1mm are not enough for alignment between elements and due to the sliding moment in between them causing the collapse of the entire structure they were improved to linear alignment joints;
All elements are numbered, but this part could be improved by defining the neighboring elements’ numbers, thus making the assembly possible without any additional instruction;
As for the 3D printing strategy – challenges found there consist of tolerances, shrinkage and expansion of the material, so called elephant’s foot at the bottom of the element – all these can be solved by testing, trying and experimenting with your machine. As for the elephant’s foot – chamfering the bottom edges of the elements worked pretty well.
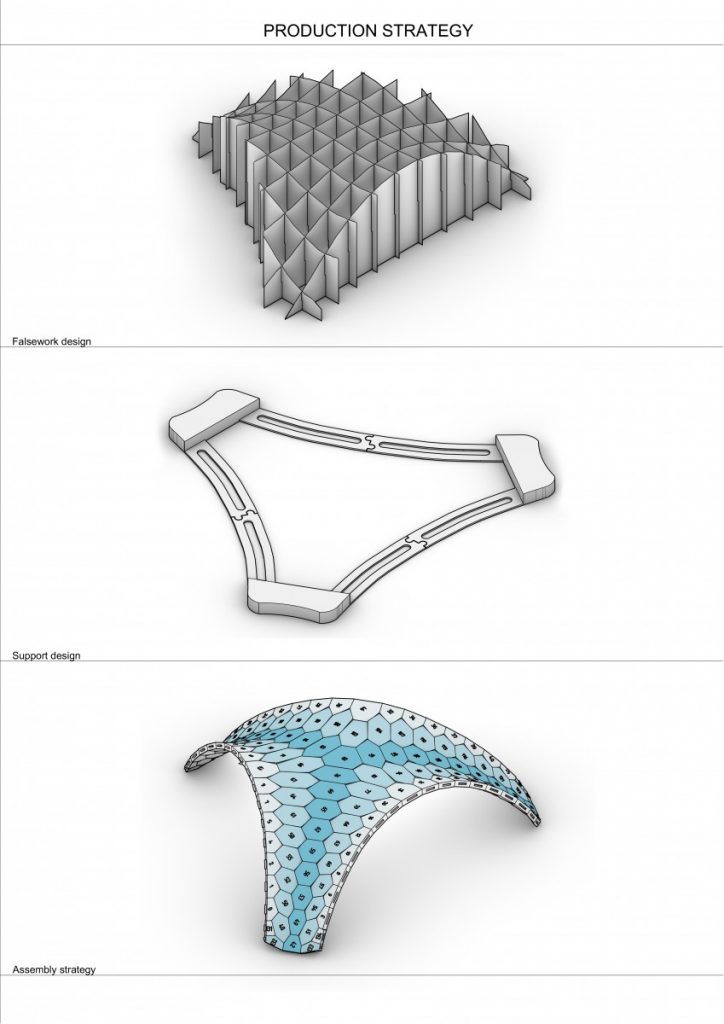
Falsework is made using Bowerbird plugin for grasshopper making it fast and easy both for the design and production.
Supports are modeled manually, but also evolving during the whole research – tolerances, joining separate parts of support structure, reducing mass for faster production, design etc.
Assembly strategy – working with smaller structures helper to very easily and intuitively understand the principle of going by stripes/arches and from medial spine while assembling the structure.
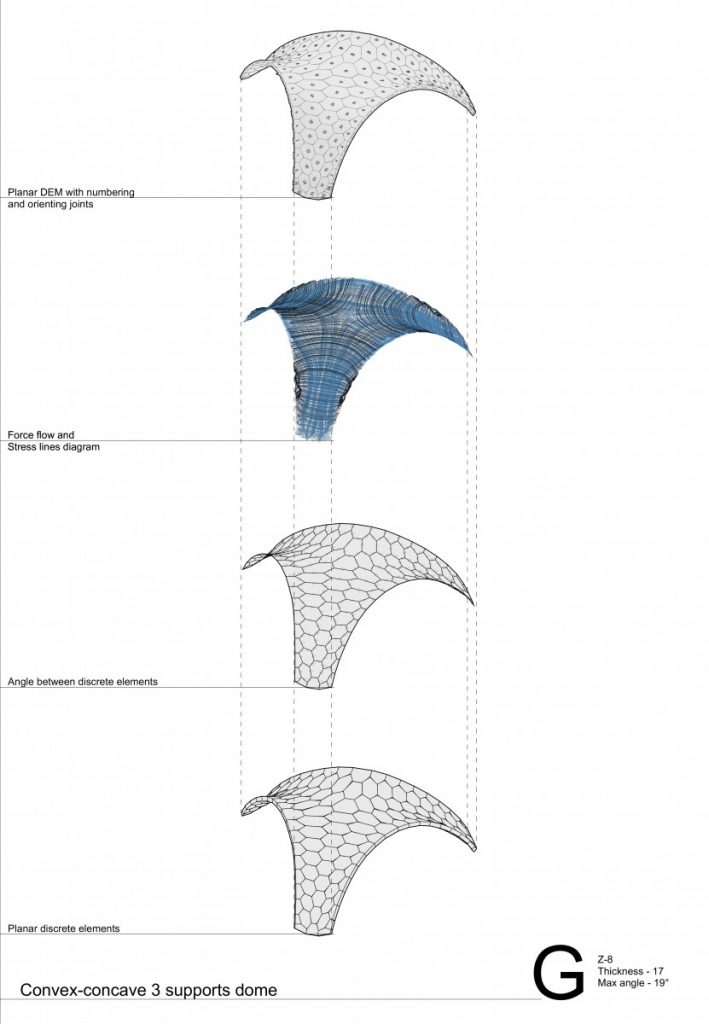
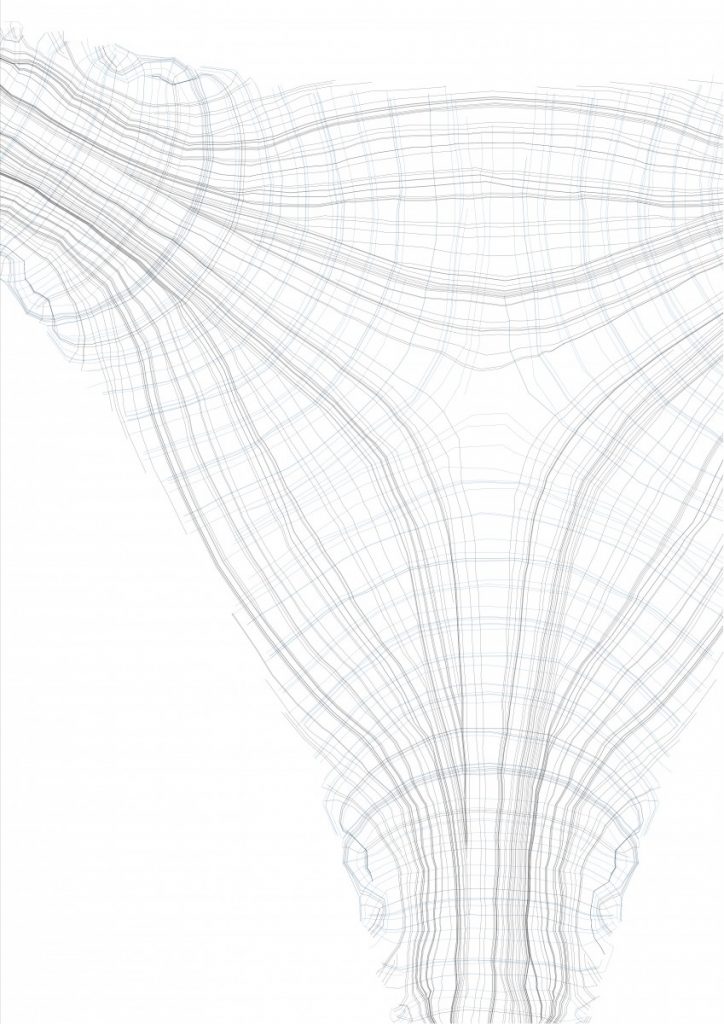
Force flow (black) and perpendicular stress lines (blue) on the shell structure.
To sum everything up, my objectives during this master thesis project is to develop a deeper understanding in the structural behavior of free form structures based on the scientific research method – learning by observation – meaning that infinitely strong digital clay model in digital environment should be tested as a physical model.
Be able to work with complex systems, investigate the possibility of adaptivity of shell structures to different terrain conditions, therefore the shift between the bespoke design and the universal design model.
Since the last post, I back tracked a little bit to refine and rationalise the ‘loop’ path. By analysing the steepness of this region in more detail, ridges in the rock are highlighted. I then traced these ridges and extended them to meet the next one, which formed a boundary. I took the inner region of these lines, and gave a fillet at the intersections. This loop is now a series of straight segments and arcs.
Rationalising the path | Plan of Dödviken
A benefit of building along ridges along the site is that it lowers the highest point along the route. This means that the path, which is at the average height of all the points it crosses, is lower. The bridges are a more reasonable height above the water, and the tunnels are at a more reasonable depth within the ground.
I would like to begin to analyse segments along the route for their materiality and geometry, both along the path and perpendicular to it. This can begin to form rules and inform the program of the camp.
Finally, this model shows a segment along the route where the path cuts through the rock as a tunnel, crosses over the water as a bridge, and continues over the ground as a path.
The robot allows for direct feedback for the design strategy proposal. In oder to fully apply this method of working I formulated a strategy for the summer camp as an initial system of production, construction and form to allow for freedom in testing.
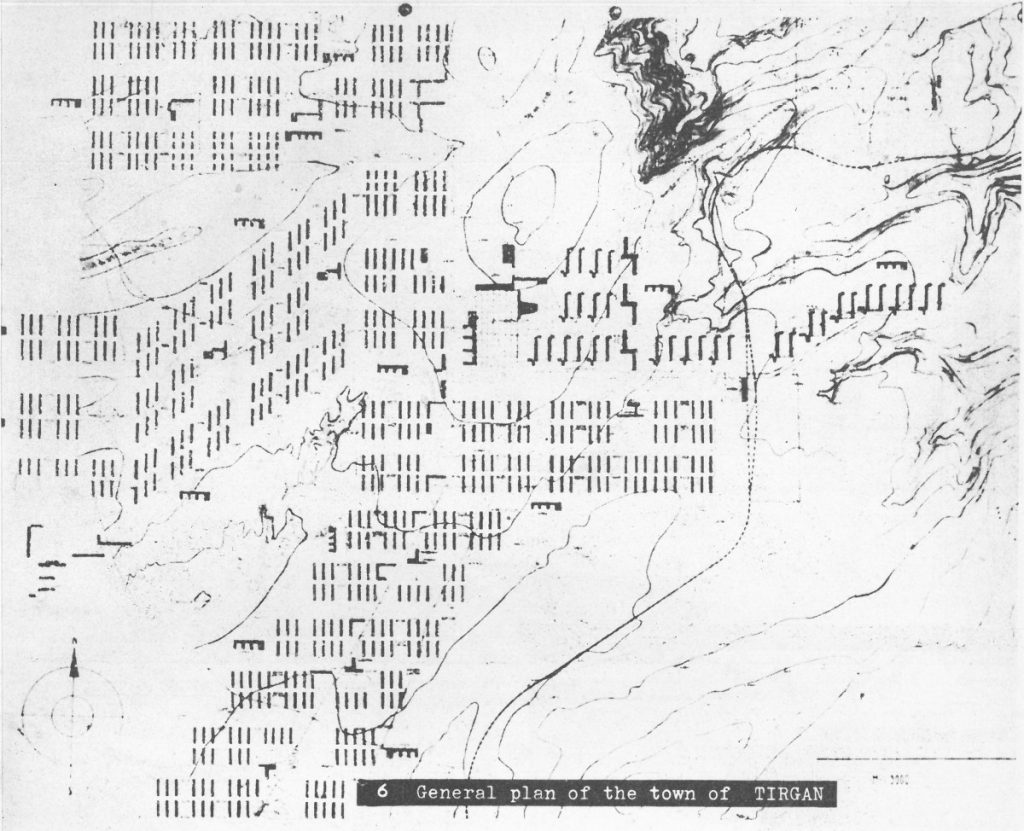
I took the soviet architectural town planning in 1930 by E. May as precedent. The linear markings on the site appears to respond to the context yet also offer an abstract notation of the program of development. The summer camp proposal for Malmon will be about setting up a grid that will be the groundwork for precast members that can easily be assembled and disassembled. Concepts of sustainability and impermanence are suggested.
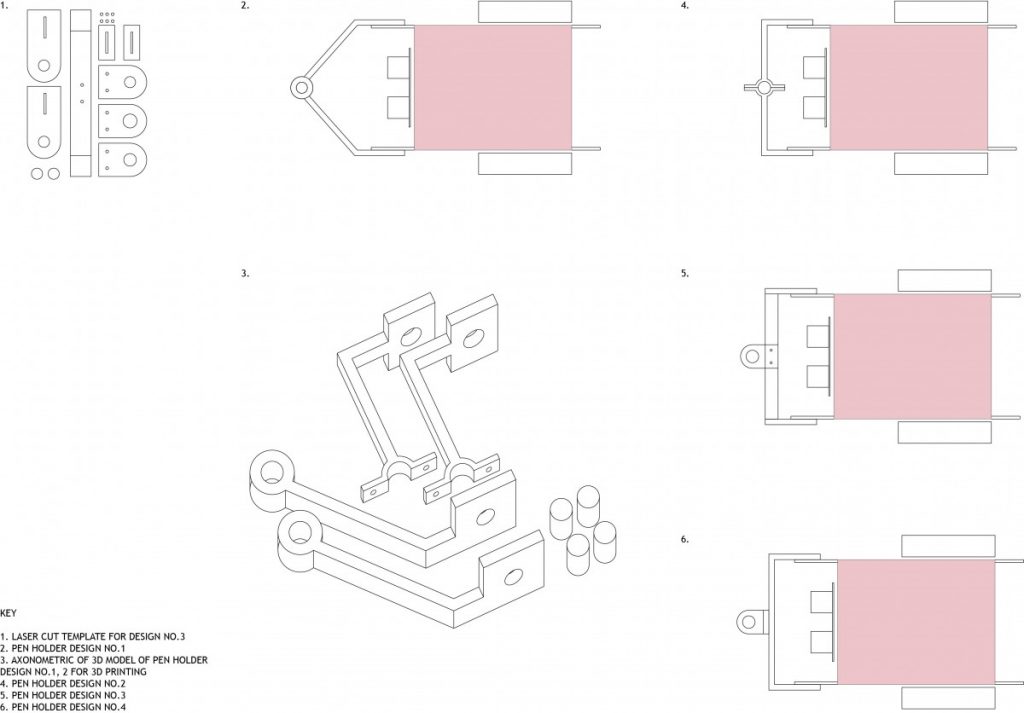
To obtain an output from the robot I 3D printed a set of arms/ pen holders to obtain a line drawing from the site analysis. While the robot scans the site, It would produce a line drawing as a data output. The implementation was dictated by the robots sensors, size and my coding capabilities. I did not achieve an outcome that could be presented or represented the idea. For the final task in this project I will work towards focusing on what data I want as an output and a much simpler application of the robots abilities.
Studio 9_Project 3_Task 2: Occupations and Interventions.
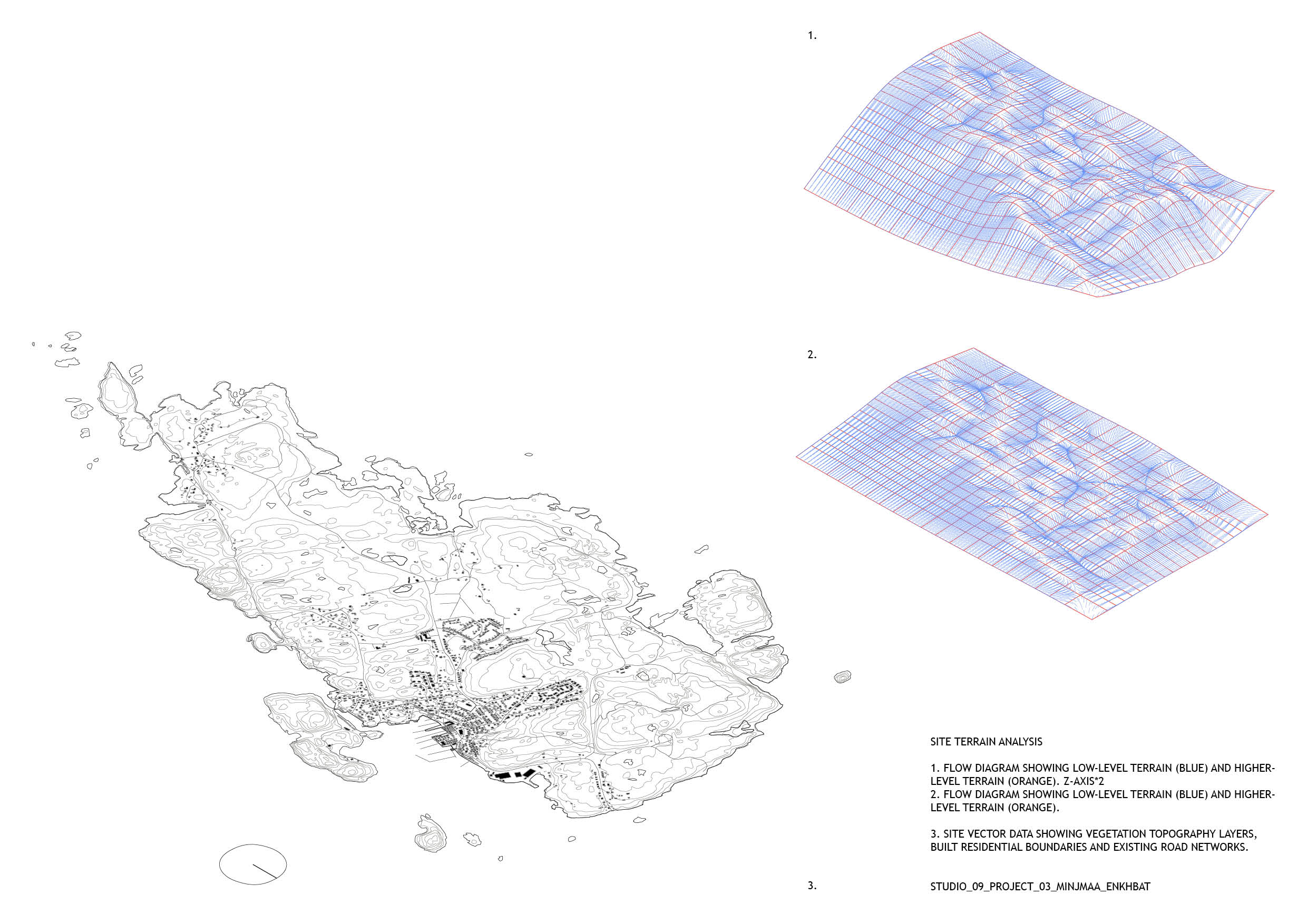
To occupy the site I began by collecting and analysing site data for Malmön. The program QGIS for editing and analysing geospatial information was used to extract the vector information; topography, population and marine geology. A colour png map provided the basis for extracting the 3D terrain data using a python script and into Rhino, with initial topography analysis through flow diagrams in grasshopper. A photographic study was also carried out and compiled into a booklet.
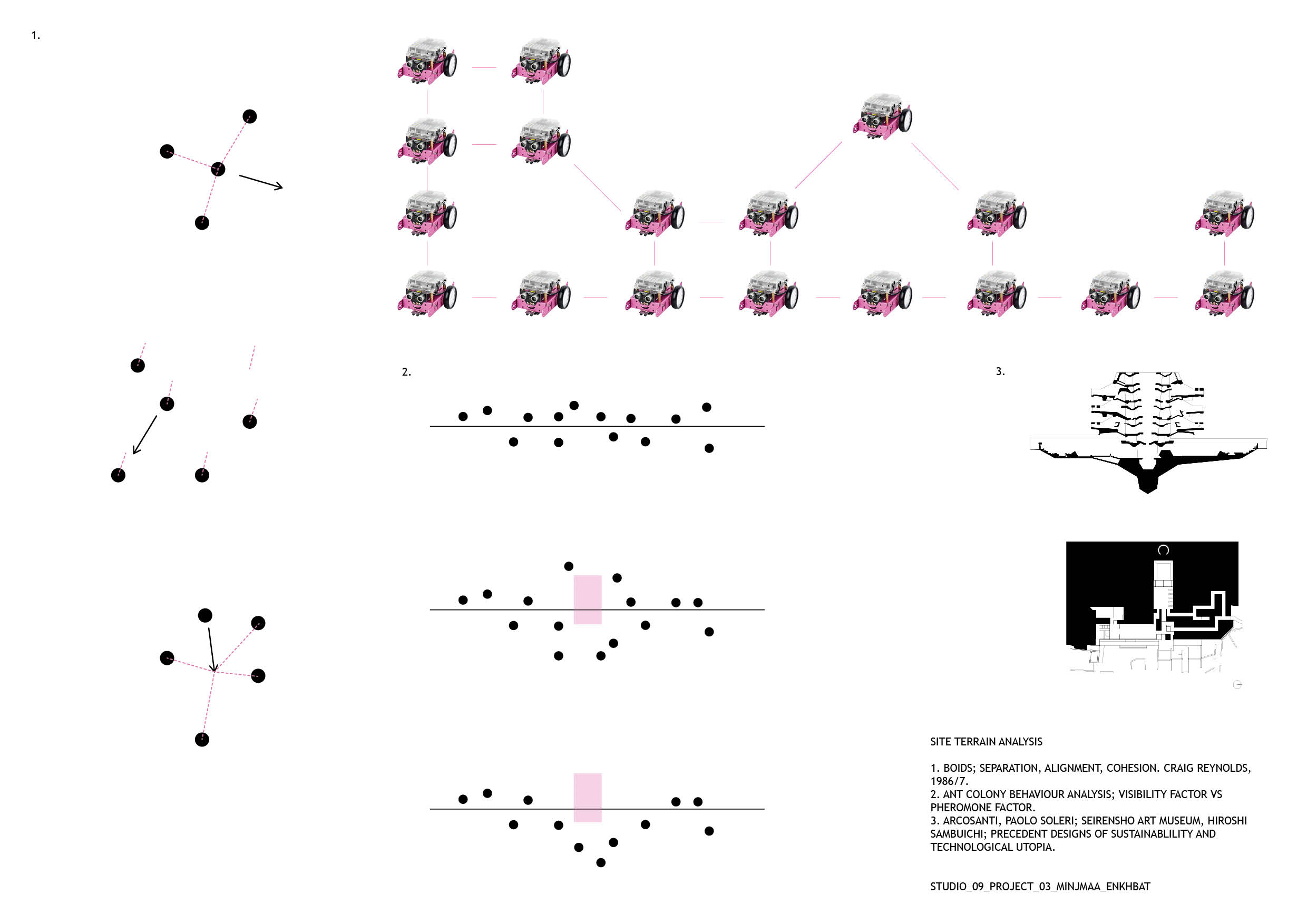
The intervention aspect was based heavily on ABM research – agent based models. An agent is aware of its surroundings and its abilities. When acting in a collective manner they exhibit swarm intelligence, the collective behaviour of decentralised self-organised systems. This means each member autonomously offers its abilities in order to study an overall system. The members, or agents, self-coordinates without a leader and cooperate in solidarity resulting in a self-healing system. This allows members to be added or removed dynamically as the agents will recalibrate in a constant feedback loop.
‘Boids’ by Craig Reynolds was the grounds for my research into swarms and flocking behaviours for computer simulations. His theory is a basic flocking model consisting of three steering behaviours; separation, alignment and cohesion. Ant colonies that organise using pheromone and visibility factors were also part of the initial studies.
I would like to base project 3 on the collection of site data using agents and subsequently allowing the agents to alter the collected data in order to intervene and implement the summer camp design on Malmön. To engage with this theory in the material dimension, I decided give form to the agent as a mini Arduino robot name Mö. This allows for real-time feedback with the tests I run for the agent simulation on site. Giving robotics agent behaviours has its own research and theory basis. Although Craig Reynolds theory of Boids is a great foundation, I also studied vehicle behaviour and coding in ‘Vehicles: Experiments in Synthetic Psychology’ by Valentino Braitenberg. Processing and Arduino will be the main programming softwares, with C and Java as scripting languages. The Nature of Code on youtube and Github, as well as Studio 09’s own processing tutorials have been great learning platforms for this.